Sonar: principles, history, types, and uses
Overview of sonar — underwater sound-based sensing systems. Covers active and passive methods, main components, historical milestones, common applications, limitations, and related distinctions.
Overview
Sonar is a technique and suite of instruments that use underwater sound to locate, identify and measure objects, distances and features beneath the surface. Broadly speaking, sonar systems either emit sound pulses and listen for echoes (active sonar) or listen for sounds generated by vessels, animals or other sources (passive sonar). Modern sonar integrates transducers, signal processing and display systems for navigation, mapping, scientific research and defence.
Image gallery
10 Images








How sonar works
Active sonar sends a controlled acoustic signal into the water and measures the time and strength of returning echoes to estimate range, bearing and sometimes the size or composition of a target. The basic physics relies on sound propagation, reflection and attenuation in water; the speed of sound in seawater, refraction and ambient noise all affect performance. Passive sonar does not transmit sound but detects and analyses noise produced by ships, marine life or machinery to infer location and identify sources.
Core components
- Transmitter/projector: generates the acoustic pulse used in active systems; see transmitter.
- Transducer/hydrophone: converts between electrical signals and sound. Arrays of hydrophones improve sensitivity and direction-finding; see hydrophone.
- Receiver and signal processor: amplifies, filters and analyses returned signals to produce range, bearing and classification data.
- User interface: displays, recorders and navigation aids present processed information to operators.
- Platform: sonar may be ship‑mounted, hull‑integrated, towed, buoyant, or carried by autonomous underwater vehicles.
History and development
The idea of listening underwater goes back centuries; explorers and inventors noted that a tube or probe could convey distant sounds. Leonardo da Vinci described a simple listening tube centuries ago, a rudimentary example of passive listening. Scientific development of active acoustic ranging advanced in the early 20th century, with notable work on ultrasonic transmitters and receivers around 1917. During the Second World War, allied navies accelerated development of shipborne systems for submarine detection; the acronym SONAR (Sound Navigation And Ranging) entered widespread use, supplanting earlier names such as ASDIC.
Types and applications
Sonar comes in many forms tailored to purpose:
- Echo sounders and single-beam: measure depth beneath a vessel for navigation and charting.
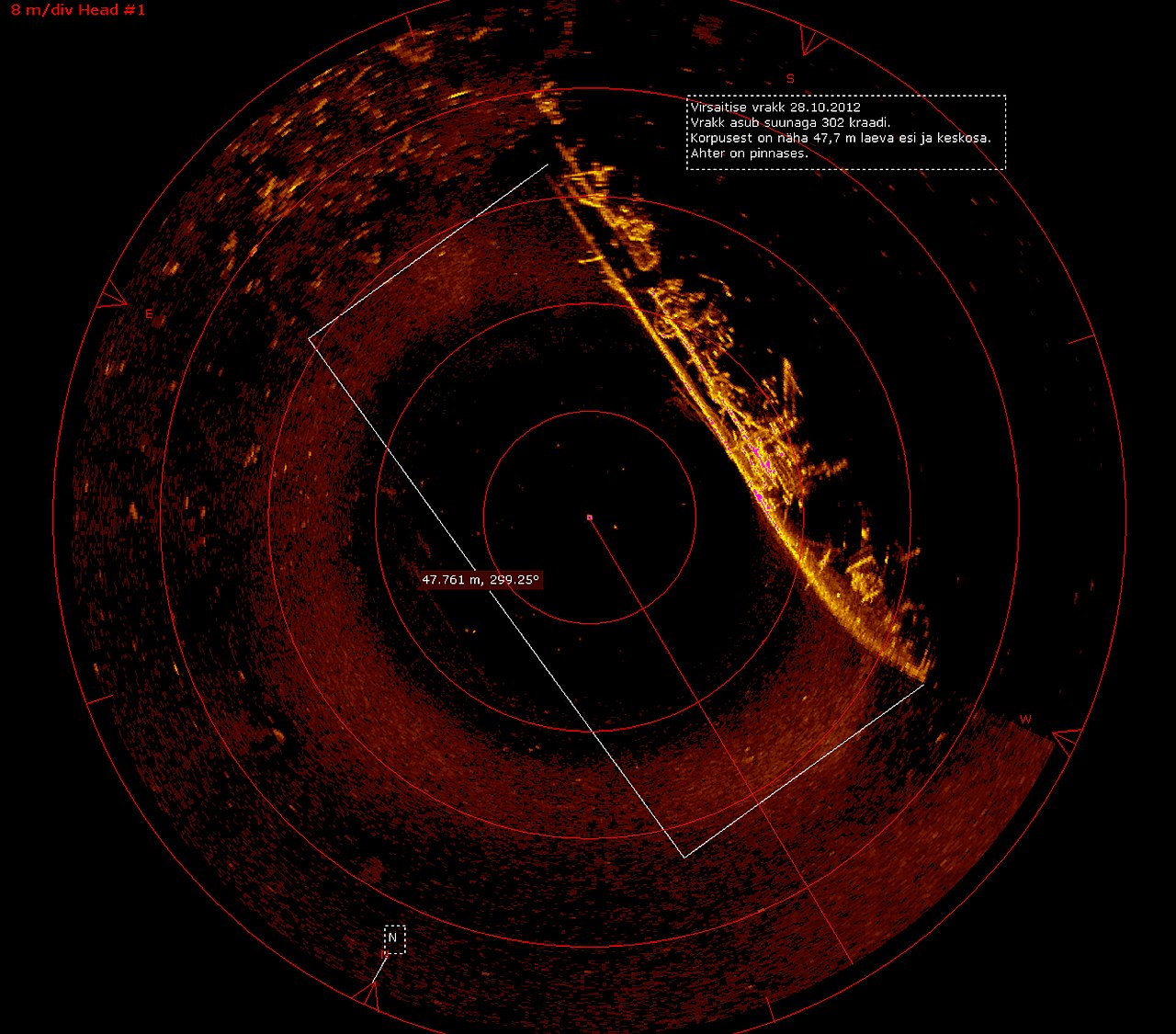
- Multibeam and side-scan sonar: map seafloor morphology and produce images useful in hydrography, archaeology and pipeline surveys.
- Fish-finders: locate schools of fish and estimate biomass for fisheries management.
- Passive arrays: used in naval listening posts and scientific monitoring to track ships, whales and seismic events.
- Submersible and AUV systems: support detailed inspection, salvage and research beneath the ice or in deep water.
Limitations and notable considerations
Sonar performance is constrained by environmental factors: sound speed varies with temperature, salinity and depth; complex seabed geometry can produce confusing echoes; and ambient noise—from weather, biological sources or shipping—reduces detection range. Active sonar can reveal the emitter’s presence to others, so its use is balanced against tactical or environmental considerations. Careful calibration, signal processing and interpretation are essential for reliable results.
Further reading and resources
- Introduction to sonar technology
- Acoustics in the marine environment
- Echo processing and detection
- Radar and sonar comparisons
- Historical notes on early listening methods
- Early developments in active acoustic systems
- Origins of the SONAR acronym
- Hydrophones and sensor arrays
- Transmitter and projector design
Related articles
Author
AlegsaOnline.com Sonar: principles, history, types, and uses Leandro Alegsa
URL: https://en.alegsaonline.com/art/91803
Sources
- oceanservice.noaa.gov : "What is sonar?"
- commons.wikimedia.org : Sonar