Shakey the Robot: pioneer of mobile AI and automated planning
Shakey was an early general-purpose mobile robot developed at SRI (1966–1972). It combined perception, reasoning and action and inspired modern AI planning, robotics and computer vision.
Overview

Shakey the Robot is widely recognized as the first general-purpose mobile robot to integrate perception, reasoning and physical action into coherent tasks. Built at the Artificial Intelligence Center of the Stanford Research Institute (now SRI International) between 1966 and 1972, Shakey demonstrated how symbolic planning and sensor data could be combined to perform goal-directed behavior in a real environment. The project is often cited as a bridge between research in robotics, computer vision and natural language processing, and as an early testbed for automated problem solving in robotics. More background on the idea of mobile AI robots can be found at this topic.
Image gallery
5 Images



Design and components
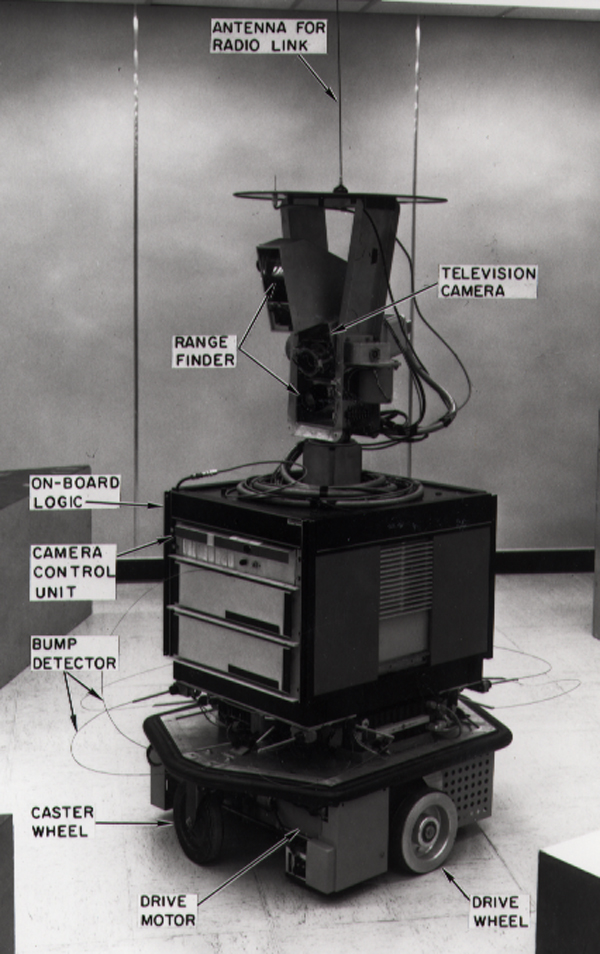
Shakey's architecture brought together several components that worked as a single system. Key elements included:
- Sensors that provided visual and range information about the environment.
- Software to interpret sensor data and form discrete descriptions of the scene.
- A symbolic planner that generated sequences of actions to reach a specified goal.
- Actuators and mobility systems that executed planned moves in the physical world.
Rather than being a single-purpose device, Shakey combined low-level perception with high-level logical reasoning so that it could select actions based on both goals and sensory input.
History and development
The project was led by researchers at SRI under the guidance of Nils J. Nilsson and others from about 1966 until 1972. During this period the team explored how an intelligent agent could plan and carry out tasks in a changing environment. Development involved researchers from several areas of artificial intelligence, and the work produced both software and experimental demonstrations that tested theoretical ideas about reasoning about actions.
Demonstrations and examples
In experimental trials, Shakey performed tasks such as navigating between rooms, avoiding obstacles, and manipulating or moving objects when required by a plan. Demonstrations emphasized the system’s ability to:
- Build internal representations of its surroundings from sensor input.
- Create action sequences that achieved specified goals.
- Adjust behavior when the environment changed or unexpected conditions appeared.
Legacy and significance
Shakey had a lasting impact on several fields. Its integration of perception, planning and execution helped motivate research into automated planning languages, cognitive robotics, and practical computer vision. The project also showed that symbolic planning mechanisms could be applied to control physical agents, influencing subsequent generations of robots and research tools. For information about one of the principal investigators, see Nils J. Nilsson.
Notable distinctions
What set Shakey apart from earlier robotic experiments was its general-purpose approach: it was not limited to a single predefined task, but designed to reason about goals and select appropriate actions across different situations. This combination of logical reasoning with embodied action made Shakey a milestone in the history of artificial intelligence and robotics, and a frequent reference point in reviews of early AI systems.
Related articles
Author
AlegsaOnline.com Shakey the Robot: pioneer of mobile AI and automated planning Leandro Alegsa
URL: https://en.alegsaonline.com/art/89403
Sources
- sri.com : "Shakey the Robot"