Electronic filter (signal processing)
An electronic filter is a circuit or algorithm that selects, suppresses or shapes frequency components of electrical signals; used in audio, radio, instrumentation and digital signal processing.
Overview
An electronic filter is any network—implemented as a physical circuit or as a digital algorithm—that modifies the spectral content of an electrical signal. Filters are used to remove unwanted frequency components, pass desired bands, or alter amplitude and phase across frequency. In broad terms a filter is an electrical circuit when implemented in hardware, and an operation in signal processing when carried out by software or firmware.
Image gallery
7 Images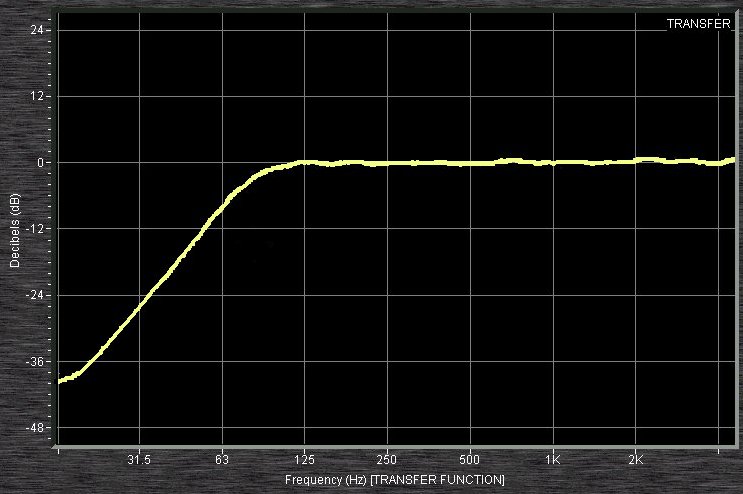





Common types and characteristics
Filters are commonly classified by their frequency response and by implementation. Typical frequency-response classes include:
- Low-pass — passes signals below a cutoff frequency and attenuates higher frequencies.
- High-pass — passes frequencies above a cutoff while reducing lower frequencies.
- Band-pass — passes a limited band between low and high cutoffs.
- Band-reject (notch) — attenuates a narrow band while passing frequencies on both sides.
- All-pass — preserves amplitude across frequencies but alters phase.
Other important descriptors are cutoff frequency, passband and stopband ripple, roll-off rate, quality factor (Q), group delay and whether the filter is linear-phase. Filters may be linear or nonlinear, continuous-time or discrete-time (sampled), and they may produce either finite impulse responses (FIR) or infinite impulse responses (IIR).
Implementations and components
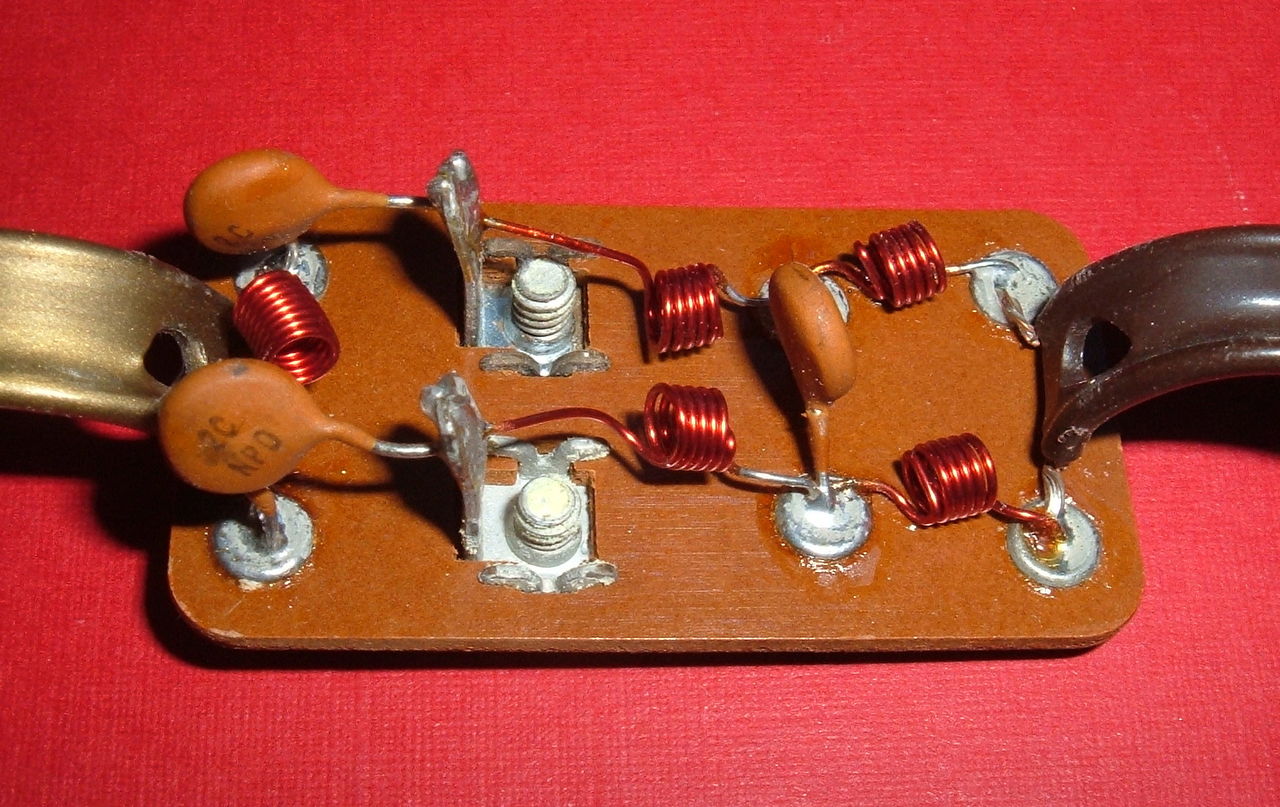
In analog hardware filters, passive elements such as resistors, capacitors and inductors form simple RC, RL or LC networks and resonant circuits. Active analog filters add amplifying elements, for example operational amplifiers, to obtain gain, buffering and improved performance without large inductors. Digital filters operate on sampled signals using arithmetic operations and memory: basic structures include direct-form difference equations, convolution for FIR filters, and recursive implementations for IIR filters.
Design approaches and examples
Design methods vary by goals and constraints. Common approximation families used to shape the magnitude response include Butterworth (maximally flat), Chebyshev (sharper transition with ripple), and elliptic (steepest transition for a given order). In digital signal processing, filters are designed in the z-domain or by transforming analog prototypes; implementations may use fast Fourier transforms for convolution-based filtering or windowed-sinc methods to produce linear-phase FIR filters.
History, applications and notable distinctions
Filters have evolved from simple passive networks in early electronics to complex active and digital designs used today. They are fundamental in many fields: audio equalization and crossover networks, radio receivers and transmitters for selecting channels, instrumentation to reduce noise, and image processing where two-dimensional filters blur or sharpen images. A notable practical distinction is between FIR filters, which can be designed for exact linear phase and are intrinsically stable, and IIR filters, which typically achieve a given response with lower computational cost but may introduce nonlinear phase and require stability checks.
Further reading and resources
For practical circuit examples, theoretical background and software tools consult introductory texts and application notes. See introductory material on circuit topology and filter design in textbooks or on tutorial pages: circuit basics, signal processing theory, implementation notes for high-pass and low-pass sections, examples of band-pass circuits and notch filters, and algorithmic approaches relating filters to transforms like the Fourier transform.
Related articles
Author
AlegsaOnline.com Electronic filter (signal processing) Leandro Alegsa
URL: https://en.alegsaonline.com/art/34335