Lunokhod 1 — Soviet lunar rover and first successful remote rover on the Moon
Lunokhod 1 was the Soviet Union's remote-controlled lunar rover that landed in 1970. This article covers its design, mission, instruments, operations, scientific contributions and later rediscovery and use in laser ranging.
Overview
Lunokhod 1 was a remote-controlled wheeled vehicle developed by the Soviet Union as part of the broader Lunokhod programme. It landed on the lunar surface on 17 November 1970 and became the first remote rover to operate successfully on another celestial body. Operated from Earth, the vehicle performed surface reconnaissance, returned imagery and scientific measurements during an extended mission lasting many lunar days and nights.
Image gallery
10 Images







Design and main characteristics
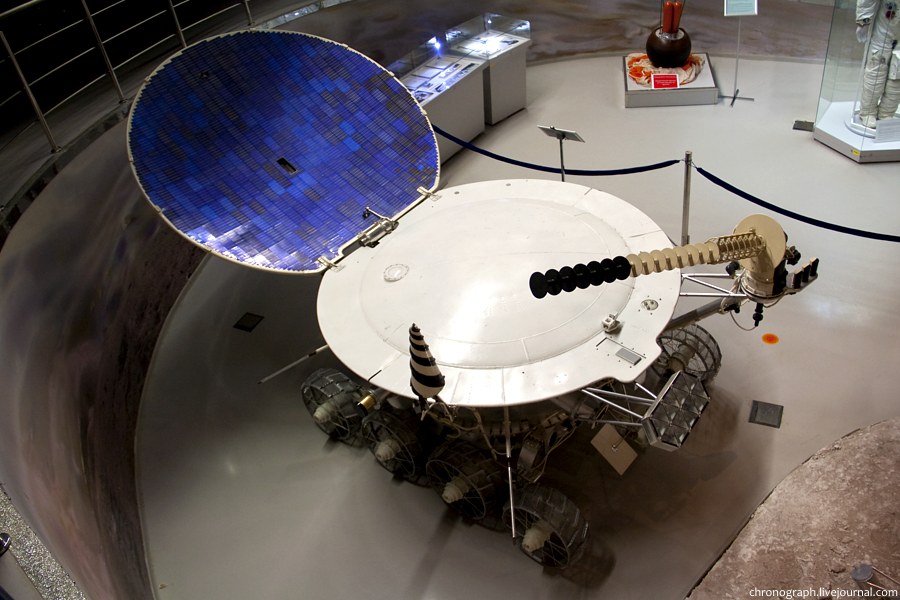
The rover was a compact, robust machine designed to survive the Moon’s harsh environment. It rode on eight independently powered wheels arranged to give mobility over rough regolith and to provide redundancy in case of wheel failure. Lunokhod 1 was solar-powered for daytime activity and used internal batteries to maintain functionality across short periods. Its control system offered a small number of safe driving speeds suitable for deliberate, remote navigation; contemporary sources report two forward speed settings used for cautious traverses.
- Structure and mobility: a pressurised, rounded compartment mounted on a chassis with eight wheels that could cope with soft soils and small obstacles.
- Navigation and imaging: multiple television cameras and panoramic viewers provided imagery for navigation and science (camera systems).
- Scientific payload: instruments for basic soil testing, a radiometer, and sensors to record mechanical and thermal properties of the local surface.
- Operations: commands were sent from a dedicated earthbound team of controllers who steered the rover by radio and processed its telemetry (mission control).
Mission timeline and operations
After a successful soft landing, Lunokhod 1 deployed and began systematic exploration of a nearby plain. Over the course of its operational life the rover traversed several kilometres, sending back thousands of images and hundreds of telemetry records that described soil bearing strength, rock distribution and small-scale morphology. Its activities included wheel-soil interaction tests, panoramic imaging, and local surface composition and temperature measurements. The slow, deliberate driving and frequent pauses allowed the Earth-based team to plan safe routes and to exercise remote driving techniques that informed later planetary rover designs.
Communications and control
Because the rover was teleoperated, effective communications and mission planning were essential. Lunokhod 1 transmitted television imagery, engineering telemetry and scientific data via a radio link to its lander and relayed to Earth. The time delay between Earth and Moon required that the controller team plan sequences of commands and then monitor the returned images and status reports before issuing further directives.
Scientific and historical significance
As the first long-lived wheeled vehicle to work on another world, Lunokhod 1 demonstrated practical robotics and produced baseline data about the lunar environment. Its measurements contributed to early models of lunar regolith mechanics, surface reflectivity and local thermal behaviour. The mission also provided a testbed for remote operations over uneven terrain and for the use of television imaging to guide off-Earth vehicles—capabilities later refined by subsequent planetary rover programmes (early rover studies).
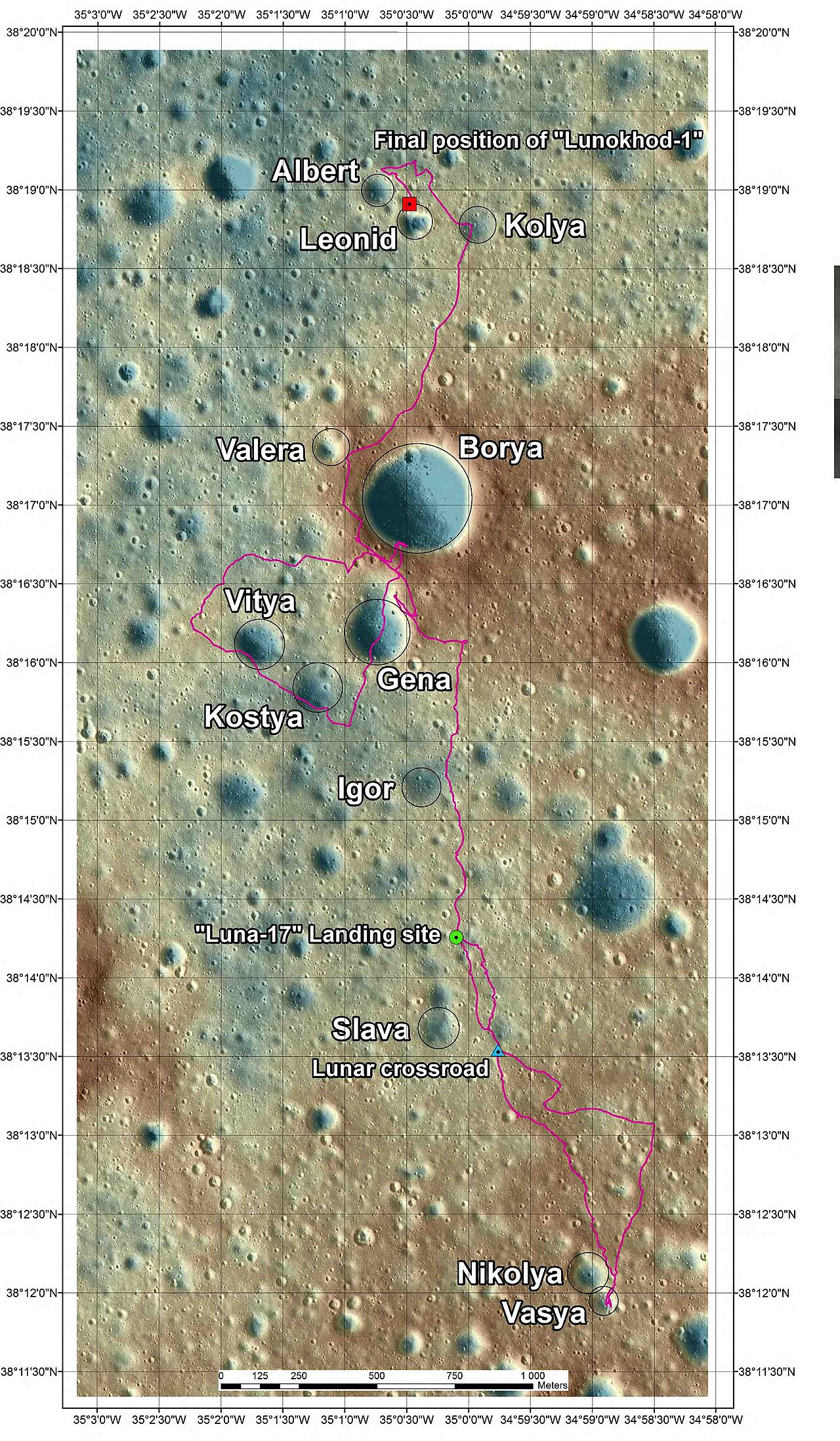
Loss, rediscovery and continued use
Contact with Lunokhod 1 was lost after several months of activity and for many years its precise location was not known. High-resolution imagery from an orbital mission, the Lunar Reconnaissance Orbiter, later revealed the lander, the rover's tracks and hardware on the surface, allowing researchers to identify the rover at a position roughly ten kilometres from its landing point. Once rediscovered, the rover’s retroreflector array again became usable for lunar laser ranging: ground stations can send laser pulses and detect the return signals from the reflector, which helps refine measurements of the Moon’s distance and dynamics.
Legacy
Lunokhod 1 remains a milestone in the history of space exploration. It proved that sustained, remote-controlled scientific work on another world was feasible, and its operational lessons influenced both robotic and crewed mission planning. Historical records, engineering reports and archival imagery continue to be studied by researchers and educators interested in the development of planetary robotics and early spaceflight achievements. For programme-level background and technical summaries, consult contemporary overviews of the Lunokhod programme, archives describing the Moon landings and engineering descriptions of the rover's camera systems and control arrangements. Additional mission histories and retrospectives are available through institutional collections and specialist publications (mission control histories, Soviet spaceflight records, and modern analyses of orbital imagery).
Related articles
Author
AlegsaOnline.com Lunokhod 1 — Soviet lunar rover and first successful remote rover on the Moon Leandro Alegsa
URL: https://en.alegsaonline.com/art/59950
Sources
- news.com.au : "Soviet moon rover Lunokhod 1 found after 40 years in lunar wilderness"
- astronautix.com : "Lunokhod"