Moment (physics): torque, turning effect and applications
A moment (or moment of force) quantifies a force's tendency to rotate a body about a point or axis. Covers definitions, formulas, vector form, units, examples, equilibrium and practical uses.
Overview. In physics, the term moment (commonly called torque in many contexts) describes how strongly a force tends to cause rotation about a specified point or axis. The moment depends on both the magnitude of the applied force and the location at which it acts. It is a foundational concept in statics and dynamics, used whenever rotation, balance, or mechanical advantage are involved.
Image gallery
2 Images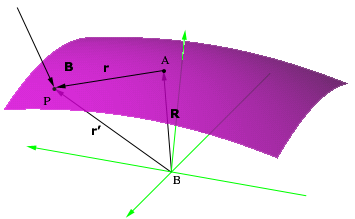
Definition and basic formula
The scalar magnitude of a moment about a point is the product of the force and the perpendicular distance from the point to the line of action of that force: Moment = Force × perpendicular distance. In symbols, the magnitude can be written as M = F × d_perp. The SI unit is the newton metre (N·m). Though this unit is algebraically identical to the joule, a moment represents a rotational effect and should not be conflated with energy.
Vector form and axes
When direction matters, moment is treated as a vector quantity. The vector moment M about a point can be expressed with the cross product M = r × F, where r is the position vector from the point to the application point of the force and F is the force vector. The resulting vector is perpendicular to the plane defined by r and F and indicates the axis and sense of rotation by the right-hand rule. Engineers often resolve moments about a chosen axis, giving a signed scalar (positive for one sense of rotation, negative for the opposite).
Principle of moments and equilibrium
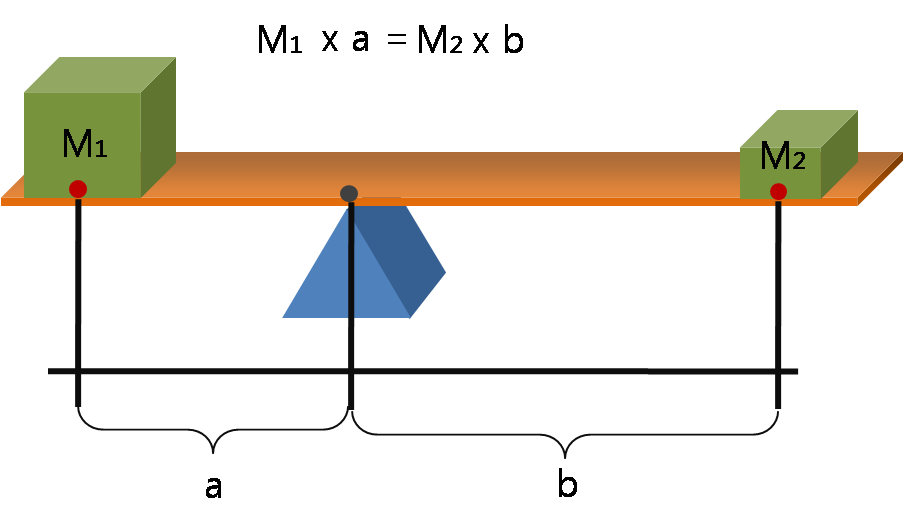
In static equilibrium, the rotational condition requires that the algebraic sum of moments about any point be zero. A simpler formulation used in many practical problems is the principle of moments: for a rigid body in balance, the sum of clockwise moments equals the sum of anticlockwise moments around a pivot. This criterion underlies balance scales, seesaws and many methods for solving statics problems.
Applications and examples
Simple machines and everyday tools exploit moments to produce mechanical advantage: changing the perpendicular distance transforms a given force into a greater or smaller turning effect. Common examples include:
- Levers, such as crowbars or seesaws: a longer effort arm reduces the required force (lever).
- Pulleys and wheel-and-axle systems that alter effective radius to change turning effect (pulley).
- Gears that transfer torque between shafts with different radii (gear).
- Wrenches and sockets, where grasping at a larger radius makes tightening bolts easier.
These devices are practical applications of mechanical advantage (mechanical advantage), which is often analyzed by comparing moments. Basic engineering calculations for beams, structural members, and rotating machinery depend directly on moment concepts and units (force and moment).
Notable distinctions and history
The concept of moments dates back to classical antiquity: Archimedes formulated the law of the lever, demonstrating how distances and forces balance to produce equilibrium. In modern mechanics, it is important to distinguish moment of a force from related quantities: torque is largely synonymous with moment in rotational dynamics, while moment of inertia is a separate property describing how mass is distributed relative to an axis and how difficult it is to change rotational speed.
Practical note: When solving problems, always identify the pivot or axis, compute perpendicular distances to force lines of action, and use sign conventions consistently. Whether in designing a machine, assessing structural loads, or simply opening a door, understanding moments clarifies how forces produce rotation.
Questions and answers
Q: What is a moment of force?
A: Moment of force, often just referred to as moment, is a measure of the tendency for a force to cause an object to rotate around a specific point or axis.
Q: What role does the moment arm play in this concept?
A: The moment arm is the distance from the axis of rotation and plays an important role in this concept. Simple machines such as levers, pulleys and gears create mechanical advantage by changing the moment arm.
Q: What is the SI unit for moments?
A: The SI unit for moments is newton meter (kgm²/s²).
Q: What is the formula for calculating moments?
A: The formula for calculating moments is Moment = Force × Perpendicular Distance.
Q: What principle applies when considering moments?
A: The Principle of Moment states that when a system is in equilibrium, the sum of its clockwise moments must equal the sum of its anticlockwise moments.
Q: Where are examples of where moments are applied?
A: Examples where moments (turning effect) are applied include levers such as seesaws, opening and closing doors, nutcrackers, can openers and crowbars.
Q: How do levers work with regards to forces and distances?
A: A lever works by using one force called effort to overcome another force called load. In physics, a moment combines both physical quantity and distance together.
Related articles
Author
AlegsaOnline.com Moment (physics): torque, turning effect and applications Leandro Alegsa
URL: https://en.alegsaonline.com/art/65913