Magnetic flux
Magnetic flux quantifies the amount of magnetic field passing through a surface. It is central to electromagnetic induction, electric machines and magnetic materials; SI unit: the weber (Wb).
Overview
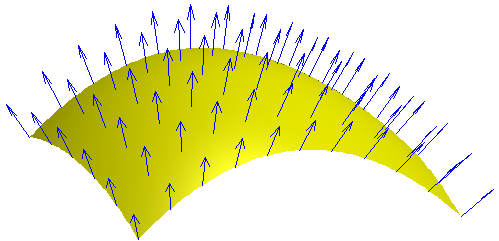
Magnetic flux is a measure of how much magnetic field penetrates a given surface. It provides a single scalar quantity that summarizes the field passing through an area, and is widely used in electromagnetic theory and electrical engineering. Magnetic flux is related to the magnetic field vector B and the surface area A by the surface integral Φ = ∫ B · dA. The flux depends on the strength and direction of the magnetic field and on the orientation and size of the surface.
Image gallery
2 Images
Definition and units
Formally, magnetic flux (often denoted Φ or ΦB) is the surface integral of the magnetic flux density B over a surface. If the field is uniform and the surface is flat, the flux reduces to Φ = B A cos(θ), where θ is the angle between the field and the surface normal. In the International System of Units the quantity is measured in webers; one weber equals one volt-second. For reference purposes the SI unit is commonly cited and the term weber (Wb) is used. In some older literature the CGS unit maxwell appears.
Physical meaning and related concepts
Magnetic flux is not a physical object but a scalar representation of the magnetic field’s interaction with a surface. Magnetic field lines are a visual aid: the flux is proportional to the number of lines crossing the surface. Flux linkage, which multiplies flux by the number of turns in a coil, is the quantity that appears in Faraday's law of electromagnetic induction. According to that law a time change in magnetic flux through a loop induces an electromotive force (emf) around the loop; this principle underlies transformers and electrical generators.
Materials, devices and practical uses
In magnetic materials such as ferromagnets the internal arrangement of atomic magnetic moments (domains) affects how magnetic flux is channeled. Designers of electromagnets, transformers and dynamos control flux with core shapes and materials to concentrate or guide the field. Engineers calculate flux to size cores and windings and to predict induced voltages, while physicists consider flux when designing devices such as beam steering magnets in particle accelerators. Practical applications include electric motors, inductors, magnetic sensors and magnetic resonance components.
Important principles and distinctions
- Gauss's law for magnetism: the net magnetic flux through any closed surface is zero, which reflects the observed absence of magnetic monopoles (Φclosed = 0).
- Flux density vs. flux: B (magnetic flux density) is a field vector with units tesla; Φ is a scalar obtained by integrating B over an area.
- Flux linkage and Faraday's law: a changing flux produces an emf proportional to the negative rate of change of flux linkage, fundamental to induction.
History and notable facts
Concepts of magnetic fields and flux developed through experimental and theoretical work in the 19th century. Michael Faraday discovered electromagnetic induction and introduced field-line thinking; James Clerk Maxwell later unified electric and magnetic phenomena into a set of field equations that include Gauss's law for magnetism. Today the idea of flux remains central in both classical engineering and modern physics, and it is routinely used in calculations for electric machines, electromagnets and other magnetic systems.
For practical calculations and reference data engineers and students often consult unit definitions and standards; the SI unit and the historical CGS unit are both useful to know. Further technical resources and application notes are available from engineering texts and standards organizations for those designing magnetic circuits and electromechanical devices.
Questions and answers
Q: What generates the field around a magnetic material?
A: Magnetic flux generates the field around a magnetic material.
Q: What does magnetic flux consist of?
A: Magnetic flux consists of photons, but at a much lower frequency than the light we receive from the Sun.
Q: Why are magnetic field lines not visible to the naked eye?
A: Magnetic field lines are not visible to the naked eye because of their low frequency.
Q: What provides a material with its magnetism?
A: The alignment of electrons in the atomic shells of Ferromagnets and, separately, the “spinning” electrons in Electromagnets, provide a material with its magnetism.
Q: What is the SI unit of magnetic flux?
A: The SI unit of magnetic flux is the Weber (Wb) in derived units, such as volt-seconds.
Q: What is the CGS unit of magnetic flux?
A: The CGS unit of magnetic flux is the Maxwell.
Q: Who uses magnetic flux in their work?
A: Electrical engineers designing systems with electromagnets, designing dynamos, and physicists designing particle accelerators use magnetic flux in their work.
Related articles
Author
AlegsaOnline.com Magnetic flux Leandro Alegsa
URL: https://en.alegsaonline.com/art/60625