Linear mapping (linear transformation)
A linear mapping is a function between vector spaces that preserves vector addition and scalar multiplication. This article explains definition, properties, matrix form, examples, and applications.
Overview
A linear mapping, also called a linear transformation or linear operator, is a function between two vector spaces that preserves the vector space operations: addition and scalar multiplication. Formally, a function f satisfies f(u+v)=f(u)+f(v) and f(cu)=c f(u) for all vectors u,v and scalars c. Linear mappings are central in mathematics and especially in linear algebra, where they describe structure-preserving correspondences between spaces.
Image gallery
3 Images

Key properties
Important consequences of linearity include that f(0)=0, f applied to a linear combination equals the same linear combination of images, and the image of a subspace is a subspace. The kernel (null space) and image (range) are fundamental invariants used to classify mappings and compute dimensions.
- Additivity: f(u+v)=f(u)+f(v).
- Homogeneity: f(cu)=c f(u).
- Kernel & image: ker(f) and im(f) measure failure of injectivity and surjectivity.
Matrix representation
Given bases of domain and codomain, every linear mapping can be represented by a matrix. Composition of linear maps corresponds to matrix multiplication; invertible linear maps correspond to invertible matrices. Changing bases applies a similarity or conjugation transform to the matrix representation. See a basic reference: linear maps and matrices.
Examples and applications
Common examples include rotations, reflections, projections, and scaling in Euclidean spaces, all of which are linear maps represented by matrices. Linear mappings model systems in physics, engineering, computer graphics, data analysis, and differential equations. Finite-dimensional examples are often taught alongside computations of rank, determinant, and eigenvalues; infinite-dimensional examples appear in functional analysis.
History and context
The concept evolved as part of 19th-century algebra and geometry, becoming formalized with the development of vector space axioms. Modern treatments place linear mappings at the heart of abstract algebraic structures and categorical perspectives. For more background and rigorous definitions consult general references and introductory texts on vector spaces.
Distinctions and notable facts
Not every function between vector spaces is linear; nonlinear maps like translations are excluded. Linear maps preserve origin and straight lines through origin but need not preserve lengths or angles unless additional structure (inner product) is respected. Computational tools often reduce problems about linear maps to matrix algorithms; further topics include canonical forms and spectral theory. Further reading: advanced topics.

Definition
Let  and be
and be  vector spaces over a common ground body
vector spaces over a common ground body  . A mapping
. A mapping  is called a linear mapping if for all
is called a linear mapping if for all  and
and  the following conditions hold:
the following conditions hold:
 is homogeneous:
is homogeneous:

- is additive:

The two conditions above can also be combined:

For  this transitions into the condition for homogeneity and for
this transitions into the condition for homogeneity and for  into that for additivity. Another equivalent condition is the requirement that the graph of the mapping is a subvector space of the sum of the vector spaces and
into that for additivity. Another equivalent condition is the requirement that the graph of the mapping is a subvector space of the sum of the vector spaces and
Explanation
A mapping is linear if it is compatible with the vector space structure. That is, linear mappings are compatible with both the underlying addition and scalar multiplication of the domain of definitions and values. Compatibility with addition means that the linear mapping preserves sums. If we  have a sum
have a sum  with the domain of definition, then
with the domain of definition, then  and thus this sum is preserved after the mapping in the range of values:
and thus this sum is preserved after the mapping in the range of values:

This implication can be shortened by substituting the premise into Thus, we obtain the requirement  . Analogously, compatibility can be described by scalar multiplication. This is satisfied if from the relation
. Analogously, compatibility can be described by scalar multiplication. This is satisfied if from the relation  with the scalar λ
with the scalar λ and
and  in the domain of definition it follows that also
in the domain of definition it follows that also  holds in the domain of values:
holds in the domain of values:

After substituting the premise into the conclusion we obtain the claim  .
.
· 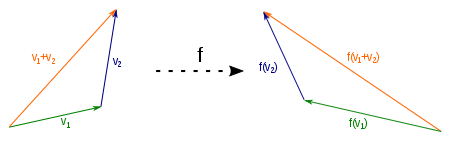
Visualization of compatibility with vector addition: each vector given by  ,
,  and addition triangle is preserved by the linear mapping Also
and addition triangle is preserved by the linear mapping Also  ,
,  and
and  forms an addition triangle and it holds that .
forms an addition triangle and it holds that .
· 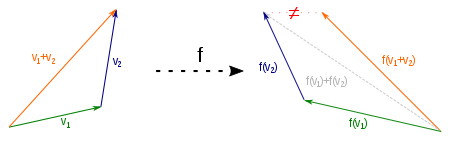
For mappings that are not compatible with addition, there are vectors , and , so that , and not form an addition triangle because  . Such a mapping is not linear.
. Such a mapping is not linear.
· 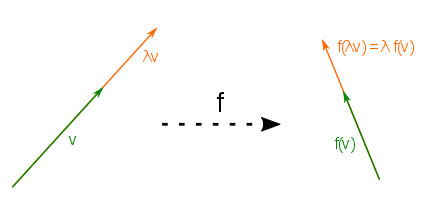
Visualization of compatibility with scalar multiplication: any scaling λ  preserved by a linear mapping and it holds .
preserved by a linear mapping and it holds .
· 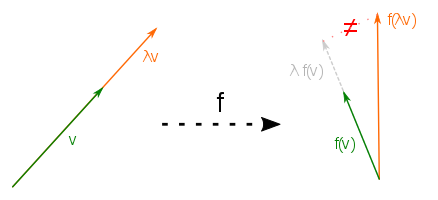
If a mapping is not compatible with scalar multiplication, then there is a scalar λ  and a vector
and a vector  , such that the scaling λ not
, such that the scaling λ not  map to the scaling λ Such a mapping is not linear.
map to the scaling λ Such a mapping is not linear.
Examples
- For any linear mapping has the form

 with
with  .
. - Let
 and
and  . Then, for each
. Then, for each  -matrix
-matrix  using matrix multiplication, we obtain a linear mapping
using matrix multiplication, we obtain a linear mapping

by
defined. Any linear mapping from
 to
to  can be represented in this way.
can be represented in this way. - If
 an open interval,
an open interval,  the
the  -vector space of continuously differentiable functions on
-vector space of continuously differentiable functions on  and
and  of -vector space of continuous functions on , then the mapping
of -vector space of continuous functions on , then the mapping
 ,
,  ,
,
which assigns to
each function its derivative, linear. The same holds for other linear differential operators.
its derivative, linear. The same holds for other linear differential operators.
· 
The stretch  is a linear mapping. In this mapping, the
is a linear mapping. In this mapping, the  component is
component is  stretched by a factor of .
stretched by a factor of .
· 
This mapping is additive: it doesn't matter if you first add vectors and then map them, or if you first map the vectors and then add them:  .
.
· 
This mapping is homogeneous: it does not matter whether you first scale a vector and then map it, or whether you first map the vector and then scale it:  .
.
Image and core
Two sets important in considering linear mappings are the image and the kernel of a linear mapping .
- The image
 the mapping is the set of image vectors under , that is, the set of all
the mapping is the set of image vectors under , that is, the set of all  with from . Therefore, the image set is also
with from . Therefore, the image set is also  notated by The image is a subvector space of .
notated by The image is a subvector space of .
- The kernel
 the mapping is the set of vectors from , which are mapped by to the zero vector of It is a subvector space of . The mapping is injective exactly if the kernel contains only the zero vector.
the mapping is the set of vectors from , which are mapped by to the zero vector of It is a subvector space of . The mapping is injective exactly if the kernel contains only the zero vector.
Properties
- A linear mapping between the vector spaces and maps the zero vector of to the zero vector of
 , because
, because 
- A relation between kernel and image of a linear mapping is described by the homomorphism : The factor space
 is isomorphic to the image .
is isomorphic to the image .
Linear mappings between finite dimensional vector spaces.
Base
A linear mapping between finite-dimensional vector spaces is uniquely determined by the images of the vectors of a basis. If the vectors form  a basis of the vector space and are
a basis of the vector space and are  vectors in , then there exists exactly one linear mapping , which maps
vectors in , then there exists exactly one linear mapping , which maps  to
to  ,
,  on
on  , ..., b_{n}}
, ..., b_{n}}
 maps to If is any vector from , then it can be uniquely represented as a linear combination of the basis vectors:
maps to If is any vector from , then it can be uniquely represented as a linear combination of the basis vectors:

Here are  the coordinates of the vector with respect to the basis
the coordinates of the vector with respect to the basis . Its image is given by
. Its image is given by

The mapping is injective if and only if the image vectors the basis are linearly independent. It is surjective if and only if span the target space
If one assigns to each element a basis of vector from arbitrarily, then one can use the above formula to continue this assignment uniquely to a linear mapping .
Representing the image vectors  with respect to a basis of leads to the matrix representation of the linear mapping.
with respect to a basis of leads to the matrix representation of the linear mapping.
Mapping matrix
→ Main article: Mapping matrix
If and are finite dimensional,  ,
,  , and are bases
, and are bases  of and
of and  of given, then any linear mapping
of given, then any linear mapping  be represented by an matrix This is obtained as follows: For each basis vector
be represented by an matrix This is obtained as follows: For each basis vector  from
from  the image vector
the image vector  represented
represented  as a linear combination of the basis vectors
as a linear combination of the basis vectors

The  ,
,  ,
,  form the entries of the matrix :
form the entries of the matrix :

Thus, in the  -th column are the coordinates of respect to the base
-th column are the coordinates of respect to the base  .
.
Using this matrix, one can  calculate the image vector of each vector
calculate the image vector of each vector

Thus, for the coordinates  of with respect tofollowing holds true
of with respect tofollowing holds true
 .
.
This can be expressed using matrix multiplication:

The matrix is called the mapping matrix or representation matrix of . Other notations for are  and
and ![_{B'}[f]_B](https://www.alegsaonline.com/image/062cd3a0f31d7327c7da18cc418a016a9c4a0279.svg) .
.
Dimension formula
→ Main article: Rank set
Image and core are related by the dimension theorem. This states that the dimension of is equal to the sum of the dimensions of the image and the core:


Linear mappings between infinite-dimensional vector spaces.
→ Main article: Linear operator
Especially in functional analysis one considers linear mappings between infinite-dimensional vector spaces. In this context, the linear mappings are usually called linear operators. The considered vector spaces usually carry the additional structure of a normalized complete vector space. Such vector spaces are called Banach spaces. In contrast to the finite dimensional case, it is not sufficient to study linear operators only on one basis. According to the Bairean category theorem, a basis of an infinite-dimensional Banach space has overcountably many elements and the existence of such a basis cannot be justified constructively, that is, only by using the axiom of selection. Therefore, one uses a different notion of bases, such as orthonormal bases or, more generally, Schauder bases. With this, certain operators such as Hilbert-Schmidt operators can be represented with the help of "infinite matrices", in which case infinite linear combinations must also be allowed.
Special linear mappings
Monomorphism
A monomorphism between vector spaces is a linear mapping , which is injective. This is true exactly if the column vectors of the representation matrix are linearly independent.
Epimorphism
An epimorphism between vector spaces is a linear mapping , which is surjective. This is the case exactly if the rank of the representation matrix is equal to the dimension of
Isomorphism
An isomorphism between vector spaces is a linear mapping , which is bijective. This is exactly the case if the representation matrix is regular. The two spaces and then called isomorphic.
Endomorphism
An endomorphism between vector spaces is a linear mapping where the spaces and equal:  . The representation matrix of this mapping is a square matrix.
. The representation matrix of this mapping is a square matrix.
Automorphism
An automorphism between vector spaces is a bijective linear mapping where the spaces and are equal. Thus, it is both an isomorphism and an endomorphism. The representation matrix of this mapping is a regular matrix.
Vector space of linear mappings
The set  of linear mappings from a -vector space to a -vector space is a vector space over , more precisely: a subvector space of the -vector space of all mappings from to . This means that the sum of two linear mappings and
of linear mappings from a -vector space to a -vector space is a vector space over , more precisely: a subvector space of the -vector space of all mappings from to . This means that the sum of two linear mappings and  , component-wise defined by
, component-wise defined by

is again a linear mapping and that the product

of a linear mapping with a scalar λis also a linear mapping again.
If has dimension  and dimension
and dimension  and if a base and a base
and if a base and a base  the mapping is
the mapping is

into the matrix space  is an isomorphism. Thus the vector space has dimension
is an isomorphism. Thus the vector space has dimension  .
.
If we consider the set of linear self-mappings of a vector space, i.e. the special case  , these form not only a vector space, but with the concatenation of mappings as multiplication, an associative algebra,
, these form not only a vector space, but with the concatenation of mappings as multiplication, an associative algebra,  denoted briefly by
denoted briefly by

Generalization
A linear mapping is a special case of an affine mapping.
Replacing the body by a ring in the definition of the linear mapping between vector spaces, we obtain a moduli homomorphism.
Related articles
Author
AlegsaOnline.com Linear mapping (linear transformation) Leandro Alegsa
URL: https://en.alegsaonline.com/art/58264
Sources
- en.wikibooks.org : Linear Algebra/Linear Transformations
- cfsv.synechism.org : "The Calculus of Functions of Several Variables, Linear and Affine Functions"