Linear independence
Linear independence describes when vectors (or functions) in a vector space cannot be expressed as nontrivial linear combinations of each other; it underlies bases, dimension, and many computational tests.
Overview
Linear independence is a central idea in linear algebra. It concerns collections of elements (typically vectors or functions) inside a vector space and answers whether any element in the collection can be written as a linear combination of the others. The concept determines whether a set carries redundant information or whether every member contributes something essential to span the space.
Image gallery
3 Images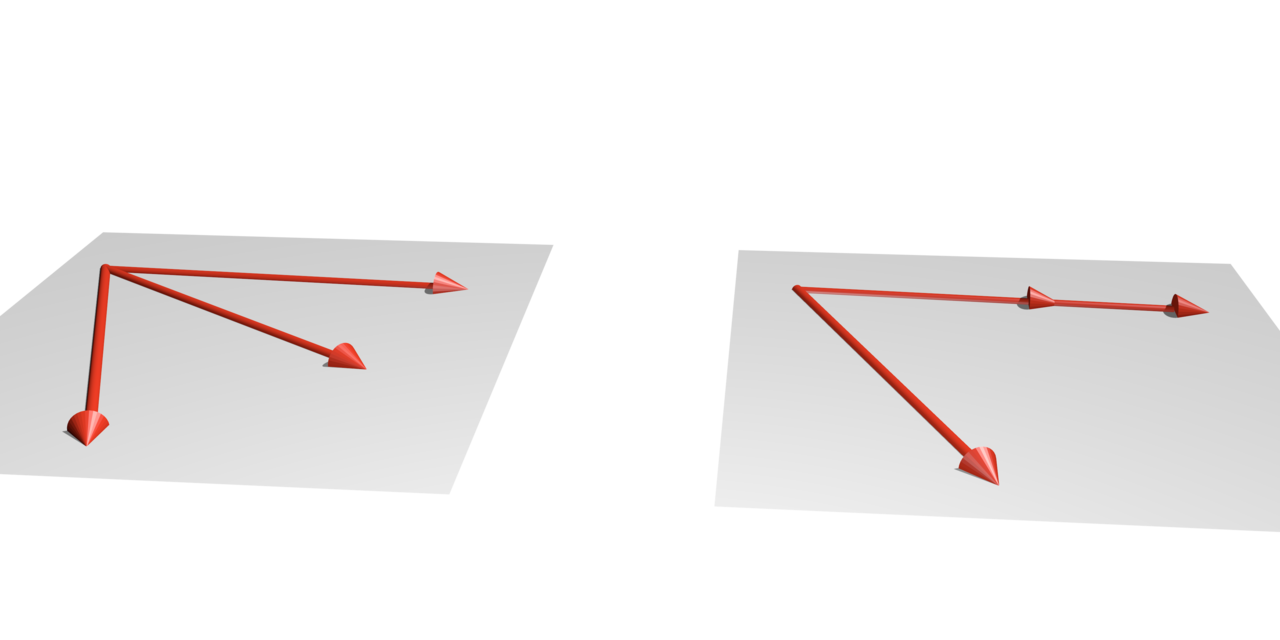


Definition
A finite family of vectors v1, v2, ..., vk in a vector space is said to be linearly independent if the only scalars a1, a2, ..., ak (from the underlying field) that satisfy
a1 v1 + a2 v2 + ... + ak vk = 0
are a1 = a2 = ... = ak = 0. If there exists a nonzero choice of scalars producing the zero vector, the family is linearly dependent. Equivalently, a set is dependent precisely when at least one member can be expressed as a linear combination of the others. The notion depends on the field: a set might be independent over the reals but dependent over a smaller field.
Key properties and tests
- The property is a feature of the whole set or family, not of an individual vector; removing a dependent vector can leave a maximal independent subset (a basis).
- For a square matrix, its columns form a linearly independent set exactly when the matrix is invertible (nonzero determinant).
- Row-reduction (Gaussian elimination) and rank computations provide mechanical tests for independence in finite-dimensional spaces.
- Infinite sets and function families require different approaches; for differentiable functions, tools such as the Wronskian sometimes help, though they are not universally decisive.
Example
Consider four vectors in three-dimensional Euclidean space (often denoted R^3):
v1 = (0, 0, 1), v2 = (0, 2, −2), v3 = (1, −2, 1), v4 = (4, 2, 3).
The first three vectors v1, v2, v3 are linearly independent: no nontrivial scalars exist that combine them to the zero vector. However, v4 can be written as a linear combination of the first three:
4 = 9·v1 + 5·v2 + 4·v3, which shows the four-vector family is linearly dependent. In this case the dependence relation exhibits explicit coefficients demonstrating redundancy.
History and applications
The notion of linear independence developed as part of the formalization of vector spaces and linear systems in the 19th and early 20th centuries, as mathematicians abstracted common features of geometry and algebra. Today it is fundamental across mathematics and applied fields. Examples of use include selecting bases to describe geometric spaces, analyzing solution spaces of differential equations, compressing data in statistics and signal processing, and determining controllability in engineering systems.
Further remarks and distinctions
When a linearly independent set spans the whole vector space it is called a basis; the number of vectors in any basis is the dimension of the space. Linear independence can be studied over different fields (real, complex, finite fields), and it extends beyond vectors to polynomials, matrices, and function spaces. Practical computation relies on elimination algorithms and numeric rank estimation; theoretical work often examines minimal spanning families, orthogonalization procedures, and structural consequences of dependence relations.
For introductory treatments and worked examples see standard texts on linear algebra and resources about vector spaces. For formal properties and proofs consult references on bases and dimension or articles addressing the behavior of linear combinations and the linear combination concept. Additional background on the zero or null vector and how families behave in different contexts is useful when moving from finite-dimensional intuition to infinite-dimensional settings.
Related discussions and exercises that illustrate when sets are independent or dependent can be found in many problem collections and lecture notes; for a concise primer consider materials that compare bases, rank, and dependent versus independent families.


Definition
Let  be a vector space over the body
be a vector space over the body  and
and  an index set. A family indexed by
an index set. A family indexed by  is called linearly independent if every finite subfamily contained in it is linearly independent.
is called linearly independent if every finite subfamily contained in it is linearly independent.
A finite family  of vectors from is called linearly independent if the only possible representation of the zero vector is as a linear combination
of vectors from is called linearly independent if the only possible representation of the zero vector is as a linear combination

with coefficients  from the basic body is the one where all coefficients
from the basic body is the one where all coefficients  equal to zero. If, on the other hand, the zero vector can also be generated non-trivially (with coefficients not equal to zero), then the vectors are linearly dependent.
equal to zero. If, on the other hand, the zero vector can also be generated non-trivially (with coefficients not equal to zero), then the vectors are linearly dependent.
The family is thus linearly dependent if and only if there  exists a finite non-empty subset and coefficients
exists a finite non-empty subset and coefficients  at least one of which is not equal to 0, so that
at least one of which is not equal to 0, so that

The zero vector  is an element of the vector space . In contrast, 0 is an element of the body .
is an element of the vector space . In contrast, 0 is an element of the body .
The term is also used for subsets of a vector space: A subset  of a vector space is called linearly independent if every finite linear combination of pairwise different vectors from
of a vector space is called linearly independent if every finite linear combination of pairwise different vectors from  can represent the zero vector only if all coefficients in this linear combination have the value zero. Note the following difference: if, for example,
can represent the zero vector only if all coefficients in this linear combination have the value zero. Note the following difference: if, for example,  is a linearly independent family, then
is a linearly independent family, then  obviously a linearly dependent family. However, the set
obviously a linearly dependent family. However, the set  is then linearly independent.
is then linearly independent.
Other characterisations and simple properties
- The vectors
 are (unless
are (unless  and
and  ) are linearly independent exactly when none of them can be represented as a linear combination of the others.
) are linearly independent exactly when none of them can be represented as a linear combination of the others.
This statement does not apply in the more general context of moduli over rings.
- A variant of this statement is the dependence lemma: If are linearly independent and
 linearly dependent, then
linearly dependent, then  as a linear combination of .
as a linear combination of .
- If a family of vectors is linearly independent, then each subfamily of this family is also linearly independent. If, on the other hand, a family is linearly dependent, then every family that contains this dependent family is also linearly dependent.
- Elementary transformations of the vectors do not change the linear dependence or the linear independence.
- If the zero vector is one of the
 (here: let
(here: let  ), they are linearly dependent - the zero vector can be generated by
), they are linearly dependent - the zero vector can be generated by  setting all except for
setting all except for  which, as a coefficient of the zero vector
which, as a coefficient of the zero vector  may be arbitrary (i.e. in particular also non-zero).
may be arbitrary (i.e. in particular also non-zero).
- In a
 -dimensional space, a family of more than vectors is always linearly dependent (see barrier lemma).
-dimensional space, a family of more than vectors is always linearly dependent (see barrier lemma).
Determination by means of determinant
If one has given  an -dimensional vector space as row or column vectors with respect to a fixed basis, one can check their linear independence by combining these row or column vectors into an
an -dimensional vector space as row or column vectors with respect to a fixed basis, one can check their linear independence by combining these row or column vectors into an  matrix and then calculating its determinant. The vectors are linearly independent if the determinant is not equal to 0.
matrix and then calculating its determinant. The vectors are linearly independent if the determinant is not equal to 0.
Basis of a vector space
→ Main article: Basis (vector space)
The concept of linearly independent vectors plays an important role in the definition and handling of vector space bases. A base of a vector space is a linearly independent generating system. Bases make it possible to calculate with coordinates, especially for finite-dimensional vector spaces.
Examples
Single vector
 Let the vector be an element of the vector space over . Then the single vector
Let the vector be an element of the vector space over . Then the single vector  linearly independent by itself exactly if it is not the zero vector.
linearly independent by itself exactly if it is not the zero vector.
For it follows from the definition of the vector space that if
 with
with  ,
, 
can only be  or
or  !
!
Vectors in the plane
The vectors  and
and  are linearly independent in
are linearly independent in  linearly independent.
linearly independent.
Proof: For  hold
hold

i.e.

Then applies

so

This system of equations is only valid for the solution ,  (the so-called trivial solution); i.e.
(the so-called trivial solution); i.e.  and
and  are linearly independent.
are linearly independent.
Standard basis in n-dimensional space
In the vector space  consider the following elements (the natural or standard basis of ):
consider the following elements (the natural or standard basis of ):




Then the vector family  with is
with is  linearly independent.
linearly independent.
Proof: For  apply
apply

But then also

and it follows that for all  .
.
Functions as vectors
Let be the vector space of all functions  . The two functions
. The two functions  and
and  in are linearly independent.
in are linearly independent.
Proof: Let and let it hold

for all  . If one derives this equation according to
. If one derives this equation according to  , then one obtains a second equation
, then one obtains a second equation

By subtracting the first equation from the second equation, we obtain

Since this equation must hold for all and thus in particular also for follows by substituting that must be. Substituting the
for all and thus in particular also for follows by substituting that must be. Substituting the  calculated in this way back into the first equation yields
calculated in this way back into the first equation yields

It follows again that (for ) must be.
Since the first equation is only solvable for and , the two functions and linearly independent.
See also: Wronski determinant
Rows
Let be the vector space of all real-valued continuous functions  on the open unit interval. Then it is true that
on the open unit interval. Then it is true that

but nevertheless are  linearly independent. Linear combinations of powers of
linearly independent. Linear combinations of powers of  are in fact only polynomials and not general power series, so in particular they are restricted near 1, so that
are in fact only polynomials and not general power series, so in particular they are restricted near 1, so that  be represented as a linear combination of powers.
be represented as a linear combination of powers.
Rows and columns of a matrix
Another interesting question is whether the rows of a matrix are linearly independent or not. Here, the rows are regarded as vectors. If the rows of a square matrix are linearly independent, the matrix is called regular, otherwise singular. The columns of a square matrix are linearly independent exactly when the rows are linearly independent. Example of a sequence of regular matrices: Hilbert matrix.
Rational independence
Real numbers that are linearly independent over the rational numbers as coefficients are called rationally independent or incommensurable. The numbers  are therefore rationally independent or incommensurable, the numbers
are therefore rationally independent or incommensurable, the numbers  on the other hand are rationally dependent.
on the other hand are rationally dependent.
Generalisations
The definition of linearly independent vectors can be applied analogously to elements of a module. In this context, linearly independent families are also called free (see also: free module).
The notion of linear independence can be further generalised to a consideration of independent sets, see Matroid.
Related articles
Author
AlegsaOnline.com Linear independence Leandro Alegsa
URL: https://en.alegsaonline.com/art/58263