Euclidean space — n-dimensional Cartesian geometry and its properties
Mathematical setting for classical geometry: the n-dimensional Cartesian space with points, vectors, distance, and inner product. Origins in Euclid and Cartesian coordinates; used throughout science and engineering.
Overview
Euclidean space is the standard mathematical model for classical, flat geometry. In practical terms it is the set of ordered n-tuples of real numbers, commonly written as Rn, whose elements represent points. Distances, angles and straight lines in this setting follow the familiar rules of plane and solid geometry. The study of these properties is classically called Euclidean geometry, whose early foundations appear in Euclid's Elements.
Image gallery
3 Images
Structure and basic properties
Formally, Euclidean space can be viewed as the vector space Rn together with an inner product that induces a norm and a metric. The inner product of two vectors defines lengths and angles, and the induced distance function d(x,y)=||x−y|| satisfies the familiar triangle inequality. Straight lines and planes are affine subspaces determined by linear equations or by a point and a direction. Isometries — transformations that preserve distances — include translations, rotations and reflections.
Key characteristics
- Points as n-tuples: each point is an ordered list of n real coordinates.
- Euclidean metric: length derived from the dot (inner) product.
- Affine and vector structure: vectors represent directions and displacements.
- Standard topology: open and closed sets, continuity and limits are the usual ones from Rn.
History and development
The ideas of Euclidean space trace to Euclid's axiomatic treatment of plane and solid geometry. Centuries later, René Descartes introduced Cartesian coordinates, which connected geometry with algebra and made the representation Rn commonplace. In the 19th and early 20th centuries geometers and logicians refined the axioms and clarified the distinction between Euclidean and non-Euclidean geometries; modern treatments place Euclidean space within the frameworks of linear algebra, metric spaces and manifold theory.
Uses, examples and importance
Euclidean space underlies much of applied mathematics and the physical sciences. Examples include the plane R2 for maps and drawings, the physical space R3 used in mechanics and optics, and higher-dimensional Rn in statistics, optimization, and data analysis. Calculus on Rn provides multivariable derivatives and integrals; linear algebra describes transformations and coordinates. Computer graphics, robotics, and engineering rely on Euclidean notions of distance and orientation.
Distinctions and notable facts
Euclidean space is "flat" in the sense that its geometry obeys the parallel postulate; this contrasts with curved geometries such as spherical or hyperbolic spaces. It is a specific example of an inner product space and an affine space, but not every affine or metric space is Euclidean. For rigorous foundations one can study axiomatic systems that characterize Euclidean geometry; these clarify which properties depend on particular axioms and which follow from algebraic structure alone. For further background see discussions of three-dimensional space and axiomatic treatments in modern texts: 3D Euclidean space and axiomatic foundations.
Euclidean vector spaces
See also: Scalar product space
From Euclidean visual space to Euclidean vector space
In analytic geometry, one associates a vector space with Euclidean space. One way to do this is to take the set of parallel displacements (translations), provided with the one behind the other as an addition. Each translation can be described by an arrow connecting a point to its image point. Two arrows, which are parallel in the same direction and have the same length, describe the same displacement. Two such arrows are called equivalent and the equivalence classes are called vectors.
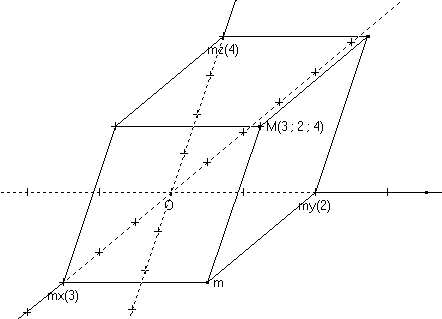
If one chooses a point  as reference point (origin) in the Euclidean space, one can assign to
as reference point (origin) in the Euclidean space, one can assign to each point
each point  its location vector , the vector represented by an arrow from the origin to the point In this way, one gets a one-to-one relationship between the Euclidean space and the associated Euclidean vector space, and can thus identify the original Euclidean space with the Euclidean vector space. However, this identification is not canonical, but depends on the choice of the origin.
its location vector , the vector represented by an arrow from the origin to the point In this way, one gets a one-to-one relationship between the Euclidean space and the associated Euclidean vector space, and can thus identify the original Euclidean space with the Euclidean vector space. However, this identification is not canonical, but depends on the choice of the origin.
One can now also transfer the length and angle measurement from Euclidean space to vectors as the length of the associated arrows and angles between such. In this way one obtains a vector space with scalar product. The scalar product is characterized by the fact that the product  a vector
a vector  with itself
with itself  gives the square
gives the square  its length From the laws of arithmetic for scalar products, the binomial formulas, and the cosine theorem (applied to a triangle whose sides correspond to vectors ,
its length From the laws of arithmetic for scalar products, the binomial formulas, and the cosine theorem (applied to a triangle whose sides correspond to vectors ,  and
and  ), we obtain the formula
), we obtain the formula
 .
.
Here denotes  the angle between vectors and .
the angle between vectors and .
General term
Starting from this, any real vector space with scalar product (of arbitrary finite dimension  ) is called a Euclidean vector space. One then uses the above formula to define length (norm) of a vector and angles between vectors. Two vectors are orthogonal if their scalar product is zero. Every three-dimensional Euclidean vector space is isometrically isomorphic to the vector space of arrow classes. Every -dimensional Euclidean vector space is isometrically isomorphic to the coordinate vector space
) is called a Euclidean vector space. One then uses the above formula to define length (norm) of a vector and angles between vectors. Two vectors are orthogonal if their scalar product is zero. Every three-dimensional Euclidean vector space is isometrically isomorphic to the vector space of arrow classes. Every -dimensional Euclidean vector space is isometrically isomorphic to the coordinate vector space  (see below). Euclidean vector spaces of the same dimension are thus indistinguishable. This entitles one to call any such one the Euclidean vector space of dimension . Some authors use the term Euclidean space also for infinite-dimensional real vector spaces with scalar product, some also for complex vector spaces with scalar product, cf. scalar product space.
(see below). Euclidean vector spaces of the same dimension are thus indistinguishable. This entitles one to call any such one the Euclidean vector space of dimension . Some authors use the term Euclidean space also for infinite-dimensional real vector spaces with scalar product, some also for complex vector spaces with scalar product, cf. scalar product space.
Lengths, angles, orthogonality and orthonormal bases
See also: Orthonormal basis
Once one has provided a real vector space with a scalar product, one can transfer the metric notions of the Euclidean visual space to it. The length (the norm, the magnitude) of a vector is then the square root of the scalar product of the vector with itself:
 .
.
Two vectors  are orthogonal (or perpendicular) to each other if their scalar product is zero:
are orthogonal (or perpendicular) to each other if their scalar product is zero:
 .
.
The (non-oriented) angle between two vectors is defined by the above formula
,
Sync and corrections by n17t01
 .
.
A vector is called a unit vector if it has length 1. A basis of unit vectors that are pairwise orthogonal is called an orthonormal basis. Orthonormal bases exist in every Euclidean vector space. If  is an orthonormal basis, then the vector represented in this basis:
is an orthonormal basis, then the vector represented in this basis:
 .
.
The coefficients are obtained by
 .
.
Isometrics
If  and are
and are  two -dimensional Euclidean vector spaces, then a linear mapping is called
two -dimensional Euclidean vector spaces, then a linear mapping is called  a (linear) isometry if it preserves the scalar product, i.e. if
a (linear) isometry if it preserves the scalar product, i.e. if

 holds for all Such a mapping
holds for all Such a mapping  is also called an orthogonal mapping. In particular, an isometry preserves lengths
is also called an orthogonal mapping. In particular, an isometry preserves lengths

and angles, i.e. in particular orthogonality

Conversely, any linear mapping that preserves lengths is an isometry.
An isometry maps every orthonormal basis back to an orthonormal basis. Conversely, if is an orthonormal basis of and  an orthonormal basis of , then there is exactly one isometry that
an orthonormal basis of , then there is exactly one isometry that  maps
maps  to
to
From this it follows that two Euclidean vector spaces of the same dimension are isometric, that is, they are indistinguishable as Euclidean vector spaces.


The Euclidean point space
Motivation
Euclidean vector spaces often serve as models for Euclidean space. The elements of the vector space are then called points or vectors, depending on the context. No distinction is made between points and their location vectors. Computationally, this can be advantageous. Conceptually, however, it is unsatisfactory:
- From a geometric point of view, points and vectors should be distinguished conceptually.
- Vectors can be added and multiplied by numbers, but points cannot.
- Points are connected or merged by vectors.
- In the vector space there is a distinguished element, the zero vector. But in Euclidean geometry all points are equal.
Description
The remedy is the concept of a Euclidean point space. This is an affine space over a Euclidean vector space. Here one distinguishes between points and vectors.
- The totality of points forms the Euclidean point space. This is usually denoted by
 ,
,  ,
,  or ^{n}} (The superscript
or ^{n}} (The superscript  is not an exponent, but an index denoting the dimension. So is not a Cartesian product).
is not an exponent, but an index denoting the dimension. So is not a Cartesian product). - The set of all vectors forms a Euclidean vector space .
- For every two points and

there exists exactly one connection vector, denoted by
. The connection vector of a point with itself is the zero vector:

- A point can be uniquely
 transformed into a point
transformed into a point  by a vector This is often denoted by
by a vector This is often denoted by  . (This is a purely formal notation. The plus sign does not denote vector space addition, nor addition on the point space.)
. (This is a purely formal notation. The plus sign does not denote vector space addition, nor addition on the point space.)
The zero vector merges every vector into itself:
- If the vector passes the point to the point and the vector
 passes the point to the point
passes the point to the point  , then
, then  transits the point into the point This can be expressed as follows:
transits the point into the point This can be expressed as follows:


In the language of algebra, these properties mean: The additive group of the vector space operates freely and transitively on the set .
Lengths, distances and angles
Line lengths, distances between points, angles and orthogonality can now be defined using the scalar product of vectors:
The length  of the line
of the line ![[PQ]](https://www.alegsaonline.com/image/1103707481b5a55fd636cb13fdd707c6822b80c6.svg) and the distance
and the distance  the points and is defined as the length of the vector :
the points and is defined as the length of the vector :

The size of the angle  is defined as the angle between the vectors and
is defined as the angle between the vectors and  :
:

Two distances and ![[RS]](https://www.alegsaonline.com/image/5c7bd107332a0ad8203392dc1b896bc31b5c4655.svg) are orthogonal if and only if the associated vectors and
are orthogonal if and only if the associated vectors and  orthogonal.
orthogonal.
Images
Length-preserving mappings of a Euclidean point space to itself are called isometries, congruence mappings (in plane geometry), or motions. They automatically preserve angles as well. If  a motion, then there exists an orthogonal mapping (linear isometry)
a motion, then there exists an orthogonal mapping (linear isometry)  , such that for all points and holds:
, such that for all points and holds:







Related articles
Author
AlegsaOnline.com Euclidean space — n-dimensional Cartesian geometry and its properties Leandro Alegsa
URL: https://en.alegsaonline.com/art/32466
Sources
- mathworld.wolfram.com : "Euclidean Space"