Focal Point Property
→ Main article: Focal point (geometry)
The connecting line between a focal point and a point of the ellipse is called focal line, guide ray or focal ray. Focal points and focal rays got their name because of the following property:
The angle between the two focal rays at one point of the ellipse is bisected by the normal at that point.
Applications
- The angle of incidence formed by one focal ray with the tangent is equal to the angle of reflection formed by the tangent with the other focal ray. A light beam that originates from one focal point is thus reflected at the elliptical tangent in such a way that it hits the other focal point. In the case of an elliptical mirror, all light rays emanating from one focal point therefore meet at the other focal point.
- Since all paths from one focal point to the other (along associated focal rays) are of equal length, sound, for example, is "amplified" by constructive interference.
- The tangent at the ellipse point is the bisector of the exterior angle. Since angle bisectors are easy to construct, the focal point property provides a simple method to construct the tangent at an ellipse point (Another tangent construction is described in Ellipse (Descriptive Geometry)).
Two ellipses with the same foci  called confocal. Through each point that is not between the foci, there is exactly one ellipse with foci . Two confocal ellipses have no intersection point (see definition of an ellipse).
called confocal. Through each point that is not between the foci, there is exactly one ellipse with foci . Two confocal ellipses have no intersection point (see definition of an ellipse).
Proof of the focal point property
Since the tangent is perpendicular to the normal, the above assertion is proven if the analogous statement holds for the tangent:
The exterior angle of the focal rays  in an ellipse point
in an ellipse point  is bisected by the tangent line at this point (see figure).
is bisected by the tangent line at this point (see figure).
Let be  the point on the straight line
the point on the straight line  with distance
with distance  to the focal point
to the focal point  (
(  is the major semi-axis of the ellipse).
is the major semi-axis of the ellipse).  Let the straight be the bisector of the exterior angles of the focal rays . To prove that is the tangent line, show that no other ellipse point can lie on From the drawing and the triangle inequality we can see that
Let the straight be the bisector of the exterior angles of the focal rays . To prove that is the tangent line, show that no other ellipse point can lie on From the drawing and the triangle inequality we can see that

holds. This means that But if  were a point of the ellipse, the sum would have to be equal to
were a point of the ellipse, the sum would have to be equal to
Remark: A proof by means of analytic geometry is in the proof archive.
Natural occurrence and application in technology:
The ceilings of some caves resemble an ellipse half. If you are - with your ears - in one focal point of this ellipse, you hear any sound whose origin lies in the second focal point amplified ("whispering vault"). This type of sound transmission even works from platform to platform in some stations of the Paris Métro. The same principle of sound focusing is used today to break up kidney stones with shock waves. A reflector in the shape of an ellipse is also used in the lamp-pumped Nd:YAG laser. The pump source - either a flash lamp or an arc lamp - is positioned in one focal point, and the doped crystal is placed in the other focal point.
Directrix
For a true ellipse, i.e.  , a parallel to the minor axis at distance
, a parallel to the minor axis at distance  a directrix or directrix. For any point of the ellipse, the ratio of its distance from a focal point to the distance from the directrix
a directrix or directrix. For any point of the ellipse, the ratio of its distance from a focal point to the distance from the directrix  on the corresponding side of the minor axis is equal to the numerical eccentricity:
on the corresponding side of the minor axis is equal to the numerical eccentricity:
 It is ε
It is ε 
Proof:
With  and
and  and the binomial formulas is
and the binomial formulas is


 .
.
The inverse of this statement is also true and can be used to further define an ellipse (similar to a parabola):
For a point  (focal point), a straight line (directrix) not through and a real number ε
(focal point), a straight line (directrix) not through and a real number ε  with
with  , the set of points (geometric locus) for which the quotient of the distances to the point and the straight line equals ε an ellipse:
, the set of points (geometric locus) for which the quotient of the distances to the point and the straight line equals ε an ellipse:

The choice ε  , i.e. the eccentricity of a circle, is not allowed in this context. One can take the infinitely distant straight line as the directrix of a circle.
, i.e. the eccentricity of a circle, is not allowed in this context. One can take the infinitely distant straight line as the directrix of a circle.
Proof:
 0 , be
0 , be  point of the curve. The directrix has the equation
point of the curve. The directrix has the equation  . With
. With  and the relation
and the relation  results in
results in
 and
and 
The substitution  yields
yields

This is the equation of an ellipse ( a parabola ( ε =
a parabola ( ε =  a hyperbola ( ε > All these non-degenerate conic sections have the origin as vertex in common (see figure).
a hyperbola ( ε > All these non-degenerate conic sections have the origin as vertex in common (see figure).
For ε one introduces new parameters  and
and  }}}}; the above equation becomes then
}}}}; the above equation becomes then

which is the equation of an ellipse with center  , the
, the  axis as major axis and the semi-axes
axis as major axis and the semi-axes  .
.
General case:
For the focal point  and the directrix
and the directrix  we get the equation
we get the equation

The right side of the equation uses the Hessian normal form of a straight line to calculate the distance of a point from a straight line.
Guideline construction:
Because of  point
point  the directrix (see picture) and the focal point are inverse with
the directrix (see picture) and the focal point are inverse with  respect to the reflection at the large vertex circle (green in the picture). Thus can be constructed from using the large vertex circle as shown in the image. Further justification for the construction is provided by the fact that the focal point and the directrix
respect to the reflection at the large vertex circle (green in the picture). Thus can be constructed from using the large vertex circle as shown in the image. Further justification for the construction is provided by the fact that the focal point and the directrix  form a pole-polar pair (see below) with respect to both the ellipse and the large vertex circle.
form a pole-polar pair (see below) with respect to both the ellipse and the large vertex circle.
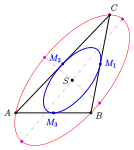
Conjugate diameters
- If for any ellipse diameter (of an ellipse chord through the ellipse center) consider
 all parallel chords, their centers also lie on an ellipse diameter
all parallel chords, their centers also lie on an ellipse diameter  . One calls the diameter conjugate to
. One calls the diameter conjugate to - If we form the conjugate diameter again to the conjugate diameter, we get the original one again. Thus, in the drawing, the diameter conjugate to coincides with the original diameter
- The tangents in the endpoints of a diameter (say ) are parallel to the conjugate diameter (in the example ).
- Major and minor axes are the only pair of orthogonal conjugate diameters.
- If the ellipse is a circle, exactly the orthogonal diameters are (also) conjugate.
- If conjugate diameters are not orthogonal, the product of their slopes is
 .
. - Let ,
 conjugate diameters. Then
conjugate diameters. Then  . (Theorem of Apollonius)
. (Theorem of Apollonius)
Conjugate diameters (primarily of ellipses) are also treated on a separate Wikipedia page, as well as the theorem of Apollonius (including proof). A complete analytical proof of all statements listed here, which starts from the common bilinear form of two lines of origin, can be found in the proof archive. This proof needs neither trigonometric functions nor parameter representations nor an affine mapping.
One possible application in the field of technical drawing is the ability to find the highest point of an ellipse or elliptical arc of any position above a line - useful e.g. for correct 2D representations of non-orthogonal views of cylindrical bodies or rounded edges without using 3D programs. This is important for the clean connection of lines running tangentially away from the ellipse. For this purpose, two chords parallel to the desired tangent direction and the line of the corresponding conjugate diameter defined by the centers of the two chords must be drawn into the ellipse or the elliptical arc. The intersection of this line with the ellipse or the elliptical arc defines the connection point of the tangent (and normally the end point of the elliptical arc).
Orthogonal tangents
→ Main article: Orthoptic curve
For the ellipse  the intersections of orthogonal tangents lie on the circle
the intersections of orthogonal tangents lie on the circle  .
.
This circle is called the orthoptic curve of the given ellipse, it is the circumcircle of the rectangle circumscribing the ellipse.
Pole-Polar Relationship
If one introduces Cartesian coordinates in such a way that the center of the ellipse lies in the origin, then an arbitrary ellipse can be described with the equation (see above section Equation). Further, for a given ellipse, a function  assigns to each a point
assigns to each a point  the straight line
the straight line  With respect to
With respect to  called a pole, the associated straight line a polar. is a bijection; the inverse function maps one polar to each pole. The ellipse center is not contained in any polar thus defined; correspondingly, no polar exists to The given equation of the polar can be
called a pole, the associated straight line a polar. is a bijection; the inverse function maps one polar to each pole. The ellipse center is not contained in any polar thus defined; correspondingly, no polar exists to The given equation of the polar can be  understood as a normal form with the corresponding normal vector
understood as a normal form with the corresponding normal vector
Such a relationship between points and lines mediated by a conic section is called a pole-polar relationship or simply polarity. Pole-polar relationships also exist for hyperbolas and parabolas, see also Pole and polar.
The following positional relationships apply to pole and polar:
- The focal point
 and the directrix
and the directrix  are polar to each other. Since both are also polar with respect to the vertex circle
are polar to each other. Since both are also polar with respect to the vertex circle  , the directrix can also be constructed with the help of compass and ruler (see also circle mirroring). (1)
, the directrix can also be constructed with the help of compass and ruler (see also circle mirroring). (1) - Exactly when the pole is outside the ellipse, the polar has two points in common with the ellipse (see figure:
 ). (2)
). (2) - Exactly when the pole lies on the ellipse, the polar has exactly one point in common with the ellipse (= the polar is a tangent; see figure:
 ). (3)
). (3) - Exactly when the pole is inside the ellipse, the polar has no point in common with the ellipse (see figure:
 ). (4)
). (4) - Each common point of a polar and an ellipse is a tangent point from the corresponding pole to the ellipse (see figure: ). (5)
- The intersection of two polars is the pole of the straight line through the poles. (6)
Derivation of the positional relationships of pole and polar; alternative derivation of a tangent and an ellipse equation.
A. If a polar is parallel to the  axis, it also has the form
axis, it also has the form  . With the associated normal vector
. With the associated normal vector  is the associated pole
is the associated pole  In particular, for
In particular, for  follows the polarity (1) of focal point and directrix.
follows the polarity (1) of focal point and directrix.
Inserting the considered polar curve into the center form of an ellipse results in the condition for the ordinate any intersection point  ; the discriminant of this quadratic equation in has, except for a positive factor, the form
; the discriminant of this quadratic equation in has, except for a positive factor, the form
 .
.
B. If a polar is not parallel to the axis, it has the principal form  . Because of
. Because of  this can be transformed into the normal form
this can be transformed into the normal form  Comparison with the normal form results in coordinates of the pole with the parameters of the main form:
Comparison with the normal form results in coordinates of the pole with the parameters of the main form:
 .
.
Inserting the main form into the midpoint form of an ellipse yields for the abscissa of any intersection the condition  ; the discriminant of this quadratic equation in has, except for a positive factor, the form
; the discriminant of this quadratic equation in has, except for a positive factor, the form

C. Overall, the term  or
or  allows the following distinction of pairwise disjoint cases for any polar:
allows the following distinction of pairwise disjoint cases for any polar:
- For
 the polar no point in common with the ellipse, and the pole lies inside the ellipse. From this follows (2).
the polar no point in common with the ellipse, and the pole lies inside the ellipse. From this follows (2). - For
 polar has exactly one point in common with the ellipse, and the pole lies on the ellipse. So the polar is a tangent to the ellipse, the pole is its point of contact (see figure: ). From this follows (3).
polar has exactly one point in common with the ellipse, and the pole lies on the ellipse. So the polar is a tangent to the ellipse, the pole is its point of contact (see figure: ). From this follows (3). - For the polar
 two points in common with the ellipse, and the pole lies outside the ellipse. From this follows (4).
two points in common with the ellipse, and the pole lies outside the ellipse. From this follows (4).
D. If a tangent is not perpendicular, solving the equation  to
to  and substituting gives the principal form of the tangent:
and substituting gives the principal form of the tangent:
 ;
;
Substituting into the coordinates  the touch point gives the coordinates of the parameter representation of an ellipse with slope
the touch point gives the coordinates of the parameter representation of an ellipse with slope  as parameter:
as parameter:  ;
;
this parameter representation does not capture the main vertices.
E. Starting from the bilinear form of the ellipse given in the section "Equation", B., the polar to the point has the normal forms
 with normal vector
with normal vector  and
and
 with normal vector
with normal vector  .
.
If is a point of the ellipse, these equations also describe a tangent.
This coordinate-free computational representation of the polar is suitable for proofs. With the coordinate representations  and
and  and the matrix coordinates for
and the matrix coordinates for  given in the section "Equation", the equation
given in the section "Equation", the equation  obtained again by evaluating the matrix products.
obtained again by evaluating the matrix products.
Proof of (5) ("Every common point of a polar and an ellipse is a tangent point from the associated pole to the ellipse."):
Since the ellipse points  lie on the polar to
lie on the polar to  and
and  . If one does not include in these equations
. If one does not include in these equations  , but
, but  or
or  as a normal vector, they state that the tangents at the ellipse points the point in common.
as a normal vector, they state that the tangents at the ellipse points the point in common.
Proof of (6) ("The intersection of two polars is the pole of the straight line through the poles."):
For an intersection  two polars to
two polars to  and
and  holds
holds  and
and  . If in these equations we do not take
. If in these equations we do not take  or
or  , but
, but  as a normal vector, they state that on the polar to the points , lie. Further, consideration of the parametric form
as a normal vector, they state that on the polar to the points , lie. Further, consideration of the parametric form  with
with

the pointwise equality of the straight line  with the polar to .
with the polar to .








































































































































































































![{\displaystyle r(\varphi )={\frac {ab}{\sqrt {a^{2}\sin ^{2}\varphi +b^{2}\cos ^{2}\varphi }}}={\frac {b}{\sqrt {1-\varepsilon ^{2}\cos ^{2}\varphi }}}\in [b,a]\quad {\text{mit}}\quad 0\leq \varphi <2\pi }](https://www.alegsaonline.com/image/c8dc6a96d5f39639f62b3e38193d29508b588b9e.svg)






![r_{\mathrm {R} }(\varphi _{\mathrm {R} })={\frac {a^{2}-e^{2}}{a+e\cos \varphi _{\mathrm {R} }}}={\frac {p}{1+\varepsilon \cos \varphi _{\mathrm {R} }}}\in [r_{\mathrm {peri} },r_{\mathrm {apo} }]\quad {\text{mit}}\quad 0\leq \varphi _{\mathrm {R} }<2\pi](https://www.alegsaonline.com/image/bfa9c4f788d7c2b53d3f7a8d8b5d7ca0bbb85f10.svg)
![r_{\mathrm {L} }(\varphi _{\mathrm {L} })={\frac {a^{2}-e^{2}}{a-e\cos \varphi _{\mathrm {L} }}}={\frac {p}{1-\varepsilon \cos \varphi _{\mathrm {L} }}}\in [r_{\mathrm {peri} },r_{\mathrm {apo} }]\quad {\text{mit}}\quad 0\leq \varphi _{\mathrm {L} }<2\pi](https://www.alegsaonline.com/image/1270348737b4303ae3564fde78beba3463dc019d.svg)























![\left.{\begin{array}{l}r_{\mathrm {L} }^{2}-r_{\mathrm {R} }^{2}=\left[y^{2}+(x+e)^{2}\right]-\left[y^{2}+(x-e)^{2}\right]=4ex=4a\varepsilon x\\r_{\mathrm {L} }^{2}-r_{\mathrm {R} }^{2}=(r_{\mathrm {L} }+r_{\mathrm {R} })(r_{\mathrm {L} }-r_{\mathrm {R} })=2a(r_{\mathrm {L} }-r_{\mathrm {R} })\end{array}}\right\}\implies r_{\mathrm {L} }-r_{\mathrm {R} }=2\varepsilon x](https://www.alegsaonline.com/image/8448d8fb13596dfb513a2aef5aeff3b53e09969f.svg)







































![{\displaystyle \varphi \in \left]0,{\frac {\pi }{2}}\right[}](https://www.alegsaonline.com/image/88eaaad47eb1f3411844f2b0b60113462511a4c0.svg)
























![{\begin{aligned}U&=2a\pi \left(1-\sum _{i=1}^{\infty }\left(\prod _{j=1}^{i}{\frac {2j-1}{2j}}\right)^{2}{\frac {\varepsilon ^{2i}}{2i-1}}\right)\\&=2a\pi \left[1-\left({\frac {1}{2}}\right)^{2}\varepsilon ^{2}-\left({\frac {1\cdot 3}{2\cdot 4}}\right)^{2}{\frac {\varepsilon ^{4}}{3}}-\ldots -\left({\frac {1\cdot 3\cdot 5\dotsm (2n-1)}{2\cdot 4\cdot 6\dotsm 2n}}\right)^{2}{\frac {\varepsilon ^{2n}}{2n-1}}-\ldots \right]\end{aligned}}](https://www.alegsaonline.com/image/d72543ea500e05b263cce5a6a6aa62832841990b.svg)














