Coriolis effect — apparent deflection in rotating frames
The Coriolis effect is the apparent deflection of moving objects observed in a rotating reference frame, responsible for large-scale wind and ocean patterns and important in meteorology, oceanography and ballistics.
Overview
The Coriolis effect is the apparent sideways deflection of the path of an object when its motion is described from a rotating frame of reference, such as the surface of the Earth. It arises because an observer who co-rotates with a body (for example, people standing on Earth) uses a different, non-inertial coordinate system than an observer in space. In everyday language the effect explains why large-scale flows in the Northern Hemisphere are deflected to the right and in the Southern Hemisphere to the left. It is not a new fundamental force acting on objects, but an inertial (apparent) force that appears in rotating coordinates.
Image gallery
10 Images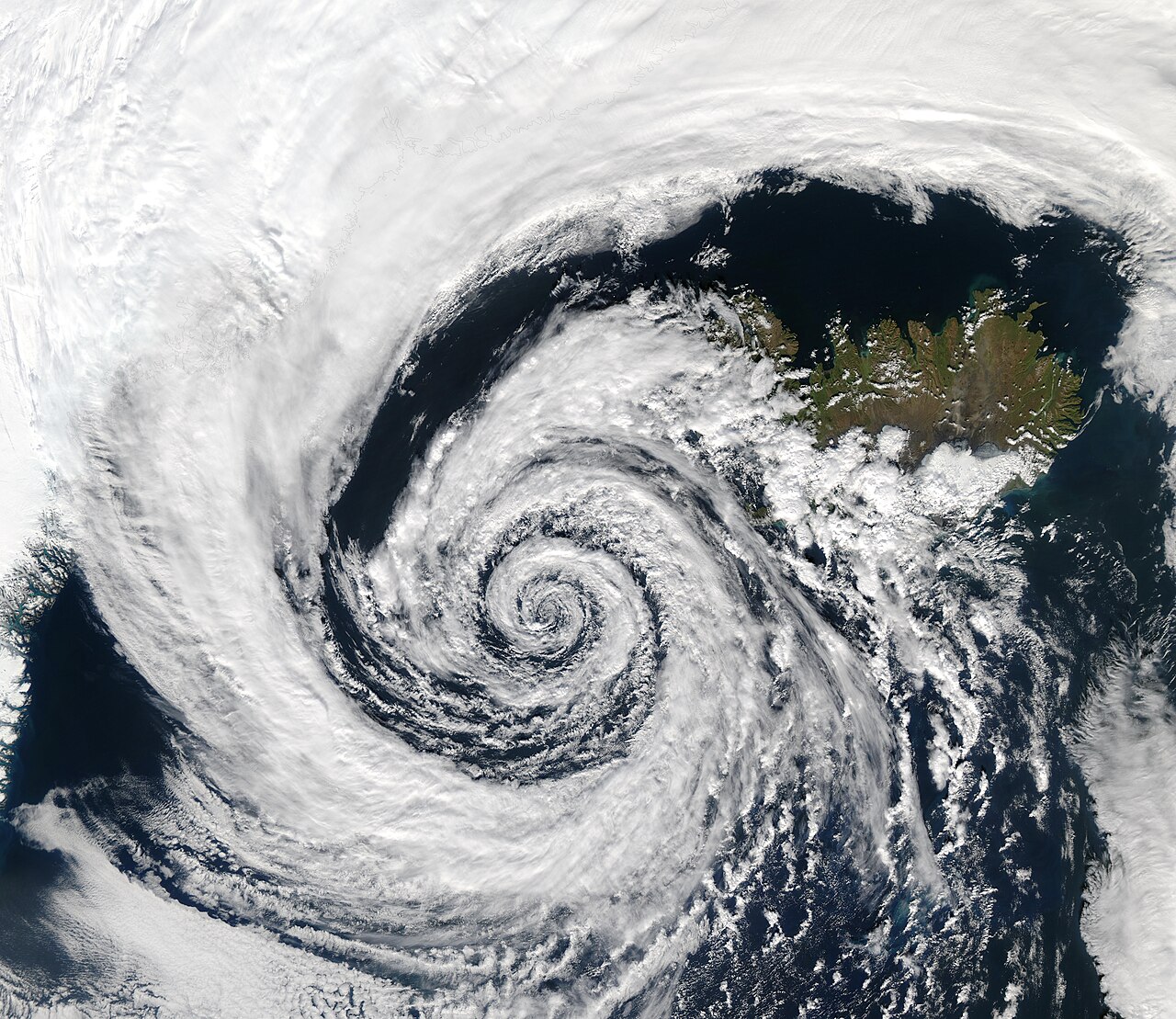









Physical origin and scale dependence
Mathematically the Coriolis acceleration is proportional to the rotation rate of the reference frame and to the velocity of the moving object; its component perpendicular to motion produces the lateral deflection. On Earth the strength varies with latitude: it is zero at the equator and increases toward the poles approximately with the sine of latitude (this dependence is commonly expressed through the Coriolis parameter). Whether the Coriolis effect dominates motion depends on scale and speed. For large, slow-moving systems like atmospheric circulation or ocean currents it is a primary influence; for small, fast, or short-lived motions it is negligible. Scientists often compare competing influences using nondimensional numbers (for example the Rossby number) to judge when Coriolis forces are important.
Examples and demonstrations
On planetary scales the Coriolis effect shapes weather systems and ocean gyres. Tropical cyclones spin counterclockwise in the Northern Hemisphere and clockwise in the Southern Hemisphere because air converging toward a low pressure center is deflected by Earth's rotation. Ocean currents and prevailing wind belts also reflect the influence of Coriolis deflection combined with pressure gradients and friction. Laboratory demonstrations include rotating tanks and the Foucault pendulum, the latter providing a visible, long-period demonstration of Earth’s rotation and the associated apparent deflection of the pendulum’s swing plane.
Common misconceptions
A persistent myth is that household drains or toilets consistently swirl in opposite directions north and south of the equator. In reality, the Coriolis effect on such small scales is vanishingly small compared with local asymmetries in the basin shape, initial motion of the fluid, and viscous effects. Only flows that are large enough and allowed to develop undisturbed over long times exhibit a clear Coriolis-induced bias. Another notable point is that the equator is the transition zone where the sign of the Coriolis deflection changes; near-equatorial storms rely on other processes in addition to Coriolis for their organization.
History and context
The phenomenon was first analyzed in modern form by Gaspard Gustave de Coriolis in 1835 when he examined forces in rotating machinery and moving bodies relative to a rotating frame; his work later became widely applied to atmospheric and oceanic motions. Subsequent development of geophysical fluid dynamics and meteorology integrated the Coriolis concept into models of large-scale circulation. For readers seeking historical source material see early analyses by Coriolis and summaries in later reviews: further reading on the Coriolis effect.
Importance and notable facts
- Essential for understanding global wind patterns, storm rotation and ocean gyres.
- Important in navigation, long-range ballistics and flight planning where small lateral deflections accumulate over long distances.
- Irrelevant for many small-scale engineering and household flows, where geometry and viscosity dominate.
- Provides one explanation for systematic differences between hemispheres, but always acts together with pressure gradients, friction, and conservation of angular momentum.

Introduction
An explanation of the Coriolis force, which tries to make do with everyday words and without relevant prior knowledge, could be as follows:
Only a force can change the instantaneous speed of a body according to amount or direction, because out of itself it always "wants" to move straight-line-similarly. Now, if one wants to go to the center on a turntable on a painted straight line, the motion will appear straight only as seen from the turntable, but curved from the solid ground outside the turntable. This second judgement by a non-moving observer is decisive here. So to go straight ahead on the disk anyway, it takes the force from the side necessary for any curved motion. If one is prepared for this, one will bring up this force, similar to bracing oneself against a strong side wind. To the walker, it feels as if he must apply this force against something that will distract him. This something is called the Coriolis force.To be more precise: In a rotating reference frame, for example in one connected to a rotating disc, it can be stated that a body on which no external force acts does not move uniformly in a straight line according to the principle of inertia, but in addition to centrifugal acceleration is also always deflected perpendicular to the direction of motion. Its track is bended, thus it performs an accelerated movement. The portion of this acceleration that is perpendicular to the direction of motion and proportional to both the relative velocity on the disk and the angular velocity of the reference frame is called the Coriolis acceleration and is interpreted as the effect of a corresponding force, the Coriolis force. Similarly, it is found that a real external force of equal strength but opposite direction must act if motion relative to a rotating reference frame is to be rectilinear.
This effect is made tangible at the so-called "devil's wheel" at fairs. People are asked to walk on a rotating disc, e.g. along a painted straight line radial to the centre. Forces are necessary for this movement, as it is not a straight-line movement when viewed from the outside. As the orbital speed of the disc decreases as it moves inwards, the walker must apply a force against the direction of rotation prevailing at his location in order to slow his body down accordingly. He must also apply a force of the same direction and strength to continue turning the direction of his motion accordingly. Since the sum of these two forces and the Coriolis force exactly cancel each other out, the Coriolis force is the inertial resistance with respect to the transverse force to be applied by the runner. Since in these conditions the centrifugal force and the Coriolis force are perpendicular to each other, they can be distinguished by the walker even if the disc did not allow an outward view. The appearance of external forces in a uniform motion is thus evidence that one is not in an inertial frame.
In a well-known demonstration experiment on the Coriolis effect, a ball is made to roll as frictionlessly as possible over a rotating disc. Seen from outside the disk, the ball rolls in a straight line, because it moves uniformly due to its inertia (in the animation, the straight yellow track on the disk shown above). From the point of view of a camera fixed to the disc, the ball does not reach the red point as expected, but is deflected sideways against the direction of rotation of the disc. This deflection is the result of the Coriolis force. Its component in the circumferential direction is constant during the process, since the radius also increases at a constant speed. The deviation from the aimed target grows, measured on the arc (arc length between the sphere and the red point in the animation) in the form of a uniformly accelerated movement.
If we denote by ω  the vectorial angular velocity of the reference frame, the magnitude of which indicates how fast the reference frame is rotating, and by
the vectorial angular velocity of the reference frame, the magnitude of which indicates how fast the reference frame is rotating, and by  the velocity with which the body is moving in the reference frame, then the Coriolis acceleration is calculated
the velocity with which the body is moving in the reference frame, then the Coriolis acceleration is calculated  quite generally according to the formula
quite generally according to the formula
 .
.
The present article follows this definition of sign, which is now commonly used in physics. The conjunction of the quantities ω and is  expressed by the cross product with the symbol The three vectors ω , and ω
expressed by the cross product with the symbol The three vectors ω , and ω  thereby form a system of laws. To illustrate it, one can use the so-called "three-finger rule".
thereby form a system of laws. To illustrate it, one can use the so-called "three-finger rule".
In analogy to Newton's second law, physics assumes that the cause of this acceleration is a force proportional to it, the Coriolis force, which is the product of the mass  of the body and the Coriolis acceleration. However, since there is no physical cause for this force and also no other body on which it acts back, it is called a fictitious force or apparent force.
of the body and the Coriolis acceleration. However, since there is no physical cause for this force and also no other body on which it acts back, it is called a fictitious force or apparent force.

The direction of the resulting vector  is perpendicular to both the instantaneous direction of motion and the axis of rotation of the reference system. Therefore, the Coriolis force is always in a plane perpendicular to the axis of rotation, and is zero for motions parallel to the axis of rotation. If, as a co-rotating observer, one looks against the direction of the angular velocity, i.e. perpendicular to the counterclockwise rotating plane, the body is always deflected to the right, regardless of whether it is moving towards or away from the axis or around it.
is perpendicular to both the instantaneous direction of motion and the axis of rotation of the reference system. Therefore, the Coriolis force is always in a plane perpendicular to the axis of rotation, and is zero for motions parallel to the axis of rotation. If, as a co-rotating observer, one looks against the direction of the angular velocity, i.e. perpendicular to the counterclockwise rotating plane, the body is always deflected to the right, regardless of whether it is moving towards or away from the axis or around it.


Illustrative derivation
The following considerations, which make the phenomenon approximately comprehensible on the basis of finite intervals in time and space, yield an exact justification of the Coriolis force in the limiting case of infinitesimally small intervals.
Simple example
The uniform rectilinear motion of a force-free body is described from a rotating  coordinate system. At time
coordinate system. At time  , let the body be at
, let the body be at  , and let the
, and let the  axis lie straight in its direction of motion. At time
axis lie straight in its direction of motion. At time  , when the body
, when the body  has travelled the distance this axis has
has travelled the distance this axis has  rotated by the angle ω so that it is now at a distance
rotated by the angle ω so that it is now at a distance  from the body flying straight ahead. For small times
from the body flying straight ahead. For small times  , so the distance grows quadratically:
, so the distance grows quadratically:  . From the rotating reference frame, the force-free body thus moves uniformly accelerated perpendicular to the original direction of motion according to the law
. From the rotating reference frame, the force-free body thus moves uniformly accelerated perpendicular to the original direction of motion according to the law  . The acceleration
. The acceleration  is the Coriolis acceleration.
is the Coriolis acceleration.
Accordingly, if the body is instead to move along the rotating axis, it cannot be force-free, but must be accelerated in  the
the  direction by an external force of strength The Coriolis force is the inertial resistance to this acceleration.
direction by an external force of strength The Coriolis force is the inertial resistance to this acceleration.
Strictly speaking, this simple derivation is only valid for the infinitesimal environment of the center, where the geometric description by straight and mutually perpendicular short distances is exact in the limit case. However, it also covers the general case where the body does not begin its motion with respect to the rotating reference system at its origin, but at an arbitrary starting point. One can describe the momentary motion of the reference system just as well by choosing this starting point as the center of rotation and additionally allowing a translation of the reference system. The angular velocity remains unchanged according to amount and direction, the relative velocity too, and thus also the Coriolis force.
For an explicit description of the conditions at arbitrary starting points on the turntable see the following sections. For the further motion of the body outside the infinitesimal proximity of the starting point, see the derivation of the spiral trajectory in the section Disk Experiment.
Coriolis acceleration with radial movement away from the axis of rotation
A person stands on a disk at a distance  from the center (red dot A), and further out at a distance
from the center (red dot A), and further out at a distance  stands a pile (red dot 1). The person throws a body with velocity
stands a pile (red dot 1). The person throws a body with velocity  toward the pole. If the disc were at rest, the body would fly along the red line and
toward the pole. If the disc were at rest, the body would fly along the red line and  hit the pile after the time Δ If the person is unaware of the rotation (or of its effect on free motion), he will always expect this rectilinear motion in the direction in which he threw the body loose.
hit the pile after the time Δ If the person is unaware of the rotation (or of its effect on free motion), he will always expect this rectilinear motion in the direction in which he threw the body loose.
While the thrown body is in the air, the disc rotates through angle Δ , where ω
, where ω  is the angular velocity. The person moving with it covers the distance
is the angular velocity. The person moving with it covers the distance  on its circular arc (blue arrow) and is then located at the red point B. The pile travels a greater distance on its arc
on its circular arc (blue arrow) and is then located at the red point B. The pile travels a greater distance on its arc  because it is farther out. He is then at the red point 2. The difference of the two distances of the stake and the person is
because it is farther out. He is then at the red point 2. The difference of the two distances of the stake and the person is
 .
.
The thrower expects the thrown body at the place where the pole is now, i.e. at point 2 at the end of the dotted straight red line. For him, however, the body has flown past the pole along the curved dotted red line at a distance Δ . 
This can be explained from a "stationary" observer, who is standing next to the rotating disc and does not have to take into account any inertial forces caused by the accelerated reference frame: The body initially moved along with the throwing person on the rotating disc. Thus, at the moment of throwing, it has a tangential orbital velocity  and receives perpendicular to it the radial throwing velocity addition. After the throw he moves in a straight line (red-blue arrow) with the velocity resulting
and receives perpendicular to it the radial throwing velocity addition. After the throw he moves in a straight line (red-blue arrow) with the velocity resulting  from and In radial direction it covers the distance
from and In radial direction it covers the distance  , in tangential direction the distance
, in tangential direction the distance  and therefore reaches the place marked with the green cross. The distance in the tangential direction is the same as the distance the person travels during its circular arc, because
and therefore reaches the place marked with the green cross. The distance in the tangential direction is the same as the distance the person travels during its circular arc, because  . When the body arrives at the green cross, it still lacks the distance Δ to the pole.
. When the body arrives at the green cross, it still lacks the distance Δ to the pole.
Now Δ grows quadratically with time, because it holds:
 .
.
For the person rotating along, this looks like a uniformly accelerated movement according to the path-time law
 ,
,
where  the acceleration.
the acceleration.
Thus, the person rotating with the body can detect the deviation of the body from the intended direction by the acceleration

explain. This is the Coriolis acceleration, which in this case is only tangentially directed.
This derivation is not quite conclusive insofar as the pieces on the circular arcs were treated as straight lines. But this is exact in the limiting case of infinitesimally small distances. Therefore the formula obtained in this way is valid.
Coriolis acceleration for circular motion around the axis of rotation
See also: Centripetal acceleration#Simple derivation
In general, to maintain a circular motion at distance with arbitrary velocity  requires acceleration
requires acceleration  towards the center. If a rotating body in the inertial frame of reference has velocity
towards the center. If a rotating body in the inertial frame of reference has velocity  , then
, then  results as the centripetal acceleration that occurs in all circular motions and is caused by the centripetal force.
results as the centripetal acceleration that occurs in all circular motions and is caused by the centripetal force.
If a body moves with velocity  (relative velocity) in a reference frame performing rotational motion with angular velocity ω , then the velocity of the body as seen from the inertial frame is the sum of the orbital velocity
(relative velocity) in a reference frame performing rotational motion with angular velocity ω , then the velocity of the body as seen from the inertial frame is the sum of the orbital velocity  and the relative velocity :
and the relative velocity :
 .
.
For the centripetal acceleration of the body it follows:
 .
.
This is the centripetal acceleration, which belongs to the considered motion in the resting reference frame. It is composed of three terms. The first is the centripetal acceleration experienced by a body connected to the reference frame. This is followed by the relative acceleration and a term opposite to the Coriolis acceleration. The example shows that this division depends on the chosen reference frame, so it is arbitrary.
Resolved according to the radial acceleration in the rotating reference frame:
 .
.
The second term is the centrifugal acceleration. It is oppositely equal to the centripetal acceleration of a body connected to the reference frame. The third term is the Coriolis acceleration.
No Coriolis acceleration when moving parallel to the axis of rotation
A movement of a body parallel to the axis of rotation does not cause a Coriolis force, because no additional forces are necessary to explain it. For example, consider the case where there is a vertical climbing pole on a horizontal turntable at some distance from the centre, and a person slides down it. For him, the centrifugal force remains constant because the distance from the axis of rotation remains constant. The holding force required to maintain the constant distance, which is applied by the rod, then also remains constant. For an observer at rest, the downward motion parallel to the axis is superimposed on a circular motion about the axis, together this is a screw motion. The centripetal force required for the circular motion about the axis is exerted by the rod and is independent of the height and vertical motion of the body.
At first, it seems to be different if one jumps vertically upwards on the turntable or throws an object upwards parallel to the axis of rotation. When falling down, the starting point is not reached again - neither in relation to the disk nor in relation to the solid ground. But also at this deflection, no Coriolis-force appears, but only temporary missing of holding-force resp. centripetal-force, which at previous example all times was exerted by rod. For the rotating observer, the body is then accelerated outwards by the centrifugal force; for the stationary observer, it simply continues to move in a straight line at its initial instantaneous speed. Both descriptions lead to the same result.
Inadequate derivation
Often (even in some textbooks), the Coriolis force is illustrated or even justified solely by the fact that a body on the rotating disk must obtain a higher circumferential speed with increasing distance from the axis of rotation in order to rotate along with the disk. But this is not a correct reasoning, for it explains only half the magnitude of the Coriolis force, as even a simple calculation using the magnitudes of the vectors shows: If, at a constant radial velocity , the  body increases
body increases  its distance by Δ in time
its distance by Δ in time , its tangential velocity increases by Δ .
, its tangential velocity increases by Δ .  This gives the required acceleration to Δ
This gives the required acceleration to Δ  . This is only half the real Coriolis acceleration.
. This is only half the real Coriolis acceleration.
The flaw in this insufficient derivation lies in the inconsistent treatment of the velocity of the same object in two reference frames. If a point in space at location is  moving with velocity in the
moving with velocity in the  resting reference frame, e.g. along the x-axis, then in the rotating reference frame it is also at location (the vector just has different components so that it denotes the same location). But its velocity observed in the rotating reference frame is not equal to , but
resting reference frame, e.g. along the x-axis, then in the rotating reference frame it is also at location (the vector just has different components so that it denotes the same location). But its velocity observed in the rotating reference frame is not equal to , but  , so that it remains on the x-axis, which itself moves (against the direction of rotation) in the rotating reference frame.
, so that it remains on the x-axis, which itself moves (against the direction of rotation) in the rotating reference frame.
For the calculation the rule is decisive, how the time derivative of a variable is to be formed relative to the axes of a rotating reference system. As can be seen in the derivation of this rule, the product rule of the differential calculus is to be applied for the derivation, from which an additional summand results for the time derivative of the moving basis vectors of the rotating coordinate system. Since the acceleration is obtained by differentiating the location twice, the product rule must be applied twice. The error in the above justification of the Coriolis force is that only the first derivation is done correctly, but in the second the motion of the coordinate system is ignored. In formulas the rule for derivation is (where  stands for any vector):
stands for any vector):
 .
.
On the left is how fast the vector changes in the system at rest, on the right in the first term how this change is perceived in the rotating system.
Substituting for the space the place ![{\displaystyle {\vec {r}}(t)\ [={\vec {r}}'(t)]}](https://www.alegsaonline.com/image/358928acd75fd964ada04f9fa08a96f811df14c8.svg) gives the formula correctly (because
gives the formula correctly (because  )
)
 .
.
If one derives this equation as it stands there once again according to time (for constant and ω ), without taking into account that the special rule has to be applied again for rotating systems, we obtain for the acceleration (false)
 .
.
That's only half the Coriolis acceleration.
Only if you form the derivative of correctly so by substituting into the operator equation again, you get the additional term with the cross product a second time:

(The second summand, after multiplying out, additionally gives also the centrifugal acceleration ω  .)
.)


Related articles
Author
AlegsaOnline.com Coriolis effect — apparent deflection in rotating frames Leandro Alegsa
URL: https://en.alegsaonline.com/art/23086
Sources
- youtube.com : The Coriolis Effect
- bbc.co.uk : "Gyres and the Coriolis effect"