Vector (mathematics and physics)
A vector is a mathematical object with magnitude and direction. Covers definitions, representations, operations (addition, dot and cross), history and common applications in science and engineering.

A vector is an object that carries both a magnitude and a direction. In everyday language it describes quantities such as displacement, velocity, or force where how far and which way both matter. Graphically a vector is usually shown as an arrow: the arrowhead indicates direction and the length of the arrow encodes the magnitude. This pictorial view is useful for simple problems and geometric reasoning.
Image gallery
1 Image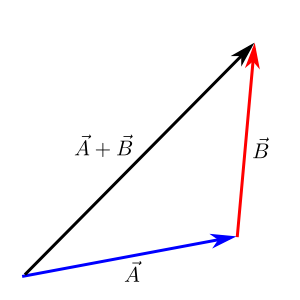
Definition and basic properties
Mathematically, a vector can be regarded in several equivalent ways: as a directed segment in space, as an ordered tuple of numbers (its components) relative to a chosen basis, or as an element of an abstract vector space satisfying rules for addition and scalar multiplication. A single vector can be translated parallel to itself without changing its intrinsic properties; this is the distinction between a free vector and a position vector anchored at an origin.
Vectors contrast with quantities that have only size, called scalars. For example, saying "move 1 kilometre" gives a scalar distance, while "move 1 kilometre north" specifies a vector. Vectors are often normalized to unit length to give a direction alone; such a vector is called a unit vector. Components of a vector describe how much the vector points along each basis direction and can be used to compute the geometric distance or length between points.
Representations and notation
In two or three dimensions a vector is commonly written in coordinates, for example (x, y) or (x, y, z), or with boldface or an arrow above a letter. The magnitude (length) of a vector v = (x, y) in a Cartesian plane is |v| = sqrt(x^2 + y^2). The angle θ between two vectors u and v is related to their dot product by u·v = |u||v|cos θ, a formula widely used in geometry and physics. When drawn, arrows are scaled so that their length is proportional to the vector magnitude.
Common operations
Vectors obey simple algebraic rules that make them central to linear algebra and calculus. Important operations include:
- Addition: Combine two vectors head-to-tail to produce a resultant vector (vector sum).
- Scalar multiplication: Stretch or shrink a vector by a real number, reversing its direction if the scalar is negative.
- Dot product: Produces a scalar equal to |u||v|cos θ and measures projection and angular relations.
- Cross product (in three dimensions): Produces a vector perpendicular to two input vectors with magnitude |u||v|sin θ and a direction given by the right-hand rule.
History and applications
The modern concept of vectors emerged in the 19th century through the work of mathematicians such as Hermann Grassmann and William Rowan Hamilton, and later through formalizations by physicists and engineers who developed vector calculus. Today vectors are foundational across sciences: in physics they model forces, velocities and fields; in engineering they describe loads and motions; in computer graphics they represent positions, normals and transforms; and in data science vectors encode features for algorithms.
Distinctions and notable facts
Not all objects called "vectors" are identical in nature. Polar (true) vectors represent standard directed quantities, while axial (pseudo) vectors, like angular momentum, change sign differently under inversion. Vectors live in vector spaces that can be finite- or infinite-dimensional, and this abstract viewpoint underlies much of modern mathematics. Simple geometric rules, combined with coordinate methods, make vectors powerful tools for analyzing direction, magnitude, and linear structure in many contexts.
History
Vector calculus was founded by Hermann Günter Graßmann, who published his Ruler Ausdehnungslehre in 1844, a book of over three hundred pages. Among others, René Descartes and August Ferdinand Möbius, a student of Carl Friedrich Gauss, are considered as precursors. Around 1850, the Irish mathematician Matthew O'Brien used the vector calculus to describe mechanical facts, but remained largely ignored. Almost simultaneously, William Rowan Hamilton developed his similar theory of quaternions, which he published in the book Lectures on Quaternions in 1853 and in the work Elements of Quaternions in 1866. In Germany the vector calculus was spread especially by lectures and books of Alfred Bucherer, August Föppl, Carl Runge, Fischer, v. Ignatowsky and Richard Gans.
Spelling and speech
Variables representing vectors are often marked with an arrow (  )school mathematics and physics.) Especially in English-speaking countries, they are also written in bold (
)school mathematics and physics.) Especially in English-speaking countries, they are also written in bold (  ,
,  or v). In manuscripts, this is often represented by underlining (
or v). In manuscripts, this is often represented by underlining (  ) or similar. In the past, writing with small Fraktur letters (
) or similar. In the past, writing with small Fraktur letters (  ) was also common in some cases, handwritten in German cursive or Sütterlin script. Frequently chosen letters are
) was also common in some cases, handwritten in German cursive or Sütterlin script. Frequently chosen letters are  and
and  . The corresponding Latin letter without vector label usually stands for the length (magnitude) of the vector:
. The corresponding Latin letter without vector label usually stands for the length (magnitude) of the vector: 
Geometry
Definition
In geometry, a vector is an object that describes a parallel displacement in the plane or in space. A displacement can be represented by an arrow connecting an original image point with its image point. Arrows that are parallel, of the same length and direction describe the same displacement and thus represent the same vector. For example, in the image on the right, the arrow from  to
to  , the arrow from
, the arrow from  to
to  and the arrow from
and the arrow from  to
to  same shift of 7 units to the right and 3 units up. They all represent the same vector
same shift of 7 units to the right and 3 units up. They all represent the same vector  . Formally, therefore, vectors can be defined as follows:
. Formally, therefore, vectors can be defined as follows:
An arrow is a directed line, that is, a line in which a sequence of endpoints is specified. Two arrows are called equivalent if they are parallel, of the same length and directed in the same way. This defines an equivalence relation on the set of arrows of the plane or space. The equivalence classes are called vectors.
Another way is to identify a vector with the parallel displacement represented by it. "Vector" is then just another way of saying "parallel displacement".
The vector describing a displacement mapping point to point  written as and represented graphically by an arrow pointing from point to point We say, "The vector
written as and represented graphically by an arrow pointing from point to point We say, "The vector  maps to ," or, "The vector connects and ." In this case, the point called the shaft, starting or starting point and the tip or end point of the vector arrow. The distance between the two points is called the length or magnitude of the vector.
maps to ," or, "The vector connects and ." In this case, the point called the shaft, starting or starting point and the tip or end point of the vector arrow. The distance between the two points is called the length or magnitude of the vector.
The reverse vector  that connects to is called the opposite vector to . The vector
that connects to is called the opposite vector to . The vector  , which maps a point is called a null vector and is
, which maps a point is called a null vector and is  denoted by
denoted by  or the only vector that cannot be represented graphically by an arrow.
or the only vector that cannot be represented graphically by an arrow.
Location and direction vectors
→ Main article: Location vector
Vectors can also be used to denote points in space. Thus, the location of the point can be denoted  by the vector
by the vector

can be represented. This vector is called the location vector belonging to the point Thereby  denotes the coordinate origin, which is the starting point for all location vectors.
denotes the coordinate origin, which is the starting point for all location vectors.
To distinguish them from each other, vectors as described in the previous section are also called direction vectors. Two direction vectors are identical if they have the same magnitude and direction. However, as shown, they can have any point in space as a starting point, while location vectors always start from the coordinate origin.
This distinction is important, among other things, in analytic geometry. There, for example, a straight line is described by the following equation:

The support vector  is the location vector of an arbitrarily chosen "support point" of the straight line. The direction vector
is the location vector of an arbitrarily chosen "support point" of the straight line. The direction vector  gives the direction of the straight line. Because
gives the direction of the straight line. Because  stands for any real number, is
stands for any real number, is  the location vector of any point of the straight line.
the location vector of any point of the straight line.
Representation in coordinates
If, as in the figure above, a rectilinear coordinate system is given, a vector of the plane can be described by an ordered pair of numbers, a vector in space by a triplet of numbers. Usually, these coordinates are written one below the other as so-called column vectors. For the vector in the plane describing the displacement by 7 units to the right (in  direction) and 3 units upward (in
direction) and 3 units upward (in  direction), write
direction), write  . The vector
. The vector  describes a displacement of 2 units in the direction and -5 units in the direction, that is, 2 units to the right and 5 units down. Correspondingly, in space the vector describes
describes a displacement of 2 units in the direction and -5 units in the direction, that is, 2 units to the right and 5 units down. Correspondingly, in space the vector describes  a displacement by 3 units in direction, 2 units in negative direction and 4 units in
a displacement by 3 units in direction, 2 units in negative direction and 4 units in  -direction.
-direction.
The coordinates of a vector can be calculated as the difference of the coordinates of the end and start point. In the example above, and have coordinates  and
and  . The coordinates of the connection vector
. The coordinates of the connection vector  then calculated as follows:
then calculated as follows:

Amount and direction
Unlike scalars, vectors have a direction. A vector is therefore characterized by its magnitude and its direction. The direction is given on the one hand by the axis position, on the other hand by the direction sense. The sense of direction indicates in which of the two directions along the axis the vector points. A change of sign in the magnitude of the vector corresponds to the reversal of the sense of direction.



Arithmetic operations
Addition and subtraction
The addition of two geometric vectors corresponds to the back-to-back execution of the associated displacements. If the vector  represents the displacement
represents the displacement  mapping the point to and the displacement associated to
mapping the point to and the displacement associated to  maps the point to
maps the point to  then
then  describes the displacement mapping to
describes the displacement mapping to

Geometrically, therefore, two vectors and be added by representing the two vectors by arrows in such a way that the start point of the second arrow coincides with the end point of the first arrow. The sum  is then represented by the arrow from the start point of the first to the end point of the second arrow.
is then represented by the arrow from the start point of the first to the end point of the second arrow.
Alternatively, the two vectors are represented by arrows with a common starting point and this figure is completed to a parallelogram. The diagonal arrow from the common starting point to the opposite corner then represents the sum of the two vectors. In physics, this construction is used for the parallelogram of forces.
In coordinates one calculates the sum component-wise: For the sum of the two vectors
 and
and 
applies
 .
.
The associative and commutative laws apply to the addition of vectors.
For the difference of two vectors and holds true
 .
.
It can be interpreted geometrically in two ways:
- As the sum of with the counter vector
 of . One places the starting point of an arrow representing the counter vector of the end point of the arrow representing
of . One places the starting point of an arrow representing the counter vector of the end point of the arrow representing - As that vector which, when added to gives even If and by arrows with the same starting point, is
 represented by the arrow leading from the endpoint of the second vector to the endpoint of the first vector.
represented by the arrow leading from the endpoint of the second vector to the endpoint of the first vector.
If two vectors are added (subtracted), their amounts add (subtract) only if the vectors are collinear and have the same orientation. In the general case, however, the triangle inequality applies:

Multiplication with a scalar
Vectors can be multiplied by real numbers (often called scalars to distinguish them from vectors) (scalar multiplication, also called S-multiplication):

The length of the resulting vector is  . If the scalar is positive, the resulting vector points in the same direction as the original one, if it is negative, in the opposite direction.
. If the scalar is positive, the resulting vector points in the same direction as the original one, if it is negative, in the opposite direction.
For vector addition and multiplication by a scalar, the distributive law applies:

The same applies to the addition of two scalars:

Scalar product
→ Main article: Scalar product
The scalar product (or inner product) of two vectors and  so called because the result is a scalar, is written as
so called because the result is a scalar, is written as  or ⟨
or ⟨  is noted and is.
is noted and is.

where φ is  the angle enclosed between the two vectors (see also cosine). If the two vectors are perpendicular to each other, then
the angle enclosed between the two vectors (see also cosine). If the two vectors are perpendicular to each other, then  , since
, since  holds.
holds.
In the Cartesian coordinate system, the scalar product is calculated to be

in particular, the square of a vector is

Geometrically, the scalar product can also be understood as follows (see figure): One projects one vector perpendicular to the other and thus obtains the vector  . If the angle φ {\displaystyleenclosed by the two vectors is an acute angle, } points in the same direction as . In this case, the scalar product is obtained by multiplying the two magnitudes of and . This number is positive. On the other hand, if the angle is an obtuse angle, the projection is antiparallel to and therefore the scalar product has a negative sign. If the two vectors enclose a right angle (
. If the angle φ {\displaystyleenclosed by the two vectors is an acute angle, } points in the same direction as . In this case, the scalar product is obtained by multiplying the two magnitudes of and . This number is positive. On the other hand, if the angle is an obtuse angle, the projection is antiparallel to and therefore the scalar product has a negative sign. If the two vectors enclose a right angle ( ), then the length of the projected vector is zero and so is the scalar product. (Swapping the two vectors in this procedure yields the same value).
), then the length of the projected vector is zero and so is the scalar product. (Swapping the two vectors in this procedure yields the same value).
This operation is often used in physics, for example, to calculate work when the direction of the force does not coincide with the direction of motion.
For the scalar product the commutative law applies

and the distributive law

Cross product
→ Main article: Cross product
The cross product (also vector product, outer product, or vector product)  (pronounced as "a cross b") of two vectors in three-dimensional Euclidean vector space is a given vector perpendicular to the plane spanned by and The length
(pronounced as "a cross b") of two vectors in three-dimensional Euclidean vector space is a given vector perpendicular to the plane spanned by and The length  this vector is equal to the area of the parallelogram with sides and , so
this vector is equal to the area of the parallelogram with sides and , so

where the angle enclosed by the two vectors  is denoted here by θ The cross product of two collinear vectors therefore gives the zero vector.
is denoted here by θ The cross product of two collinear vectors therefore gives the zero vector.
In the three-dimensional Cartesian coordinate system, the cross product can be calculated as follows:

The cross product is anticommutative, i.e., it holds

Spat product
→ Main article: Spat product
The combination of cross and scalar product in the form

is called a spar product. The result is a scalar. Its magnitude is the volume of the spar spanned by the three vectors. If the three vectors form a right system, then is  positive. If they form a link system, then is negative. If the vectors are linearly dependent, then
positive. If they form a link system, then is negative. If the vectors are linearly dependent, then  .
.
Length/amount of a vector
In Cartesian coordinates, the length of vectors can be calculated according to the Pythagorean theorem:

This corresponds to the so-called Euclidean norm. The length can also be given in an alternative notation as the root of the scalar product:

Vectors of length 1 are called unit vectors. If a vector has the length 0, it is the zero vector.
For vector quantities in physics, one speaks of the magnitude of a vector instead of the length. One can consider a vectorial physical quantity as a pair  of direction of the quantity as unit vector
of direction of the quantity as unit vector  and magnitude of the quantity along this direction. The unit of the magnitude is equal to the unit of the physical quantity. For example, the velocity
and magnitude of the quantity along this direction. The unit of the magnitude is equal to the unit of the physical quantity. For example, the velocity

of a helicopter flying at a constant altitude in a southeasterly direction through

and

represent. The magnitude of the path velocity  during horizontal throw (starting velocity in -direction
during horizontal throw (starting velocity in -direction  , current velocity in -direction
, current velocity in -direction  ) can be expressed as
) can be expressed as

Dyadic product
→ Main article: Dyadic product
The dyadic or tensorial product  or
or  (spoken as "a dyadic b") of two vectors forms a dyad. Dyads allow one vector to be mapped linearly onto another vector, see figure. The portion of a vector
(spoken as "a dyadic b") of two vectors forms a dyad. Dyads allow one vector to be mapped linearly onto another vector, see figure. The portion of a vector  in the direction of vector is thereby brought into the direction of vector and thereby stretched or compressed. The mapping is done with the above scalar product:
in the direction of vector is thereby brought into the direction of vector and thereby stretched or compressed. The mapping is done with the above scalar product:

In the three-dimensional Cartesian coordinate system, the dyadic product can be calculated as follows:

The dyadic product is not commutative, i.e., in general

but distributive with vector addition:

It is also compatible with scalar multiplication:

The dyadic product gives rise to a new class of linear algebra objects, the matrices and linear mappings, depending on whether we are computing in coordinate space or vector space. By linking several dyads (as in  ) give rise to higher level dyads. Dyads form a special case of tensors. Tensors play an important role in continuum mechanics, Maxwell's equations of electromagnetism, and general relativity. An overview of the tensor algebra is given in the collection of formulas Tensoralgebra.
) give rise to higher level dyads. Dyads form a special case of tensors. Tensors play an important role in continuum mechanics, Maxwell's equations of electromagnetism, and general relativity. An overview of the tensor algebra is given in the collection of formulas Tensoralgebra.

















Component notation
As an alternative to the notation presented here as column vectors, vectors can also be represented in component notation. Here  usually stands for the individual components of the vector with respect to the standard basis. Thus, the arithmetic operations with respect to the standard basis can be written as follows:
usually stands for the individual components of the vector with respect to the standard basis. Thus, the arithmetic operations with respect to the standard basis can be written as follows:
| Column vectors | Component notation | |
| Addition/Subtraction |
|
|
| Scalar product |
|
|
| Amount |
|
|
| Cross product |
|
|










- ↑ a b c Using Einstein's summation convention.
- ↑ ε
 is the Levi-Civita symbol and is +1 for even permutations of (1, 2, 3), -1 for odd permutations, and 0 otherwise.
is the Levi-Civita symbol and is +1 for even permutations of (1, 2, 3), -1 for odd permutations, and 0 otherwise.
See also the section Coordinates and components of a vector below.
n-tuples and column vectors
In generalization of the coordinate representation of geometric vectors, elements of  , i.e.,
, i.e.,  -tuples of real numbers, are called vectors if the arithmetic operations typical for vectors, addition and scalar multiplication, are performed with them. As a rule, the are written as so-called column vectors, i.e. their entries are one below the other.
-tuples of real numbers, are called vectors if the arithmetic operations typical for vectors, addition and scalar multiplication, are performed with them. As a rule, the are written as so-called column vectors, i.e. their entries are one below the other.
Addition and scalar multiplication
The addition of two vectors  and the scalar multiplication of a vector by a number
and the scalar multiplication of a vector by a number  are defined component-wise:
are defined component-wise:

The set with these links forms a vector space over the body  . This so-called coordinate space is the standard example of an -dimensional -vector space.
. This so-called coordinate space is the standard example of an -dimensional -vector space.
Standard scalar product
→ Main article: Standard scalar product
The standard scalar product is defined by
 .
.
With this scalar product, the is a Euclidean vector space.
Multiplication with a matrix
→ Main article: Matrix vector product
If  is a (
is a (  )-matrix and
)-matrix and  a column vector, then can be written as a one-column matrix in
a column vector, then can be written as a one-column matrix in  and
and  form the matrix vector product The result is a column vector in
form the matrix vector product The result is a column vector in  :
:

Multiplication by a ( )-matrix is a linear mapping from to . Any linear mapping can be represented as a multiplication by a matrix.
Length or standard
→ Main article: Euclidean norm
The length or norm of a vector is given by the square root of the scalar product with itself:

Besides this Euclidean norm, other norms are also used, see p-norm.
Row and column vectors
If we consider vectors as matrices, an  matrix is a column vector
matrix is a column vector

for which there is a  matrix
matrix

as the associated row vector, where is  the transpose of In this notation, the standard scalar product is nothing but the matrix product of a with an matrix:
the transpose of In this notation, the standard scalar product is nothing but the matrix product of a with an matrix:

The dyadic product represents itself as the matrix product of an with a , and then yields an  matrix:
matrix:

Vector properties
Linear dependence
Vectors  (
(  ) are called linearly dependent if there is a solution for the following equation where not
) are called linearly dependent if there is a solution for the following equation where not  hold for all coefficients:
hold for all coefficients:

However, if no coefficients  found that satisfy this condition, then the vectors are called linearly independent.
found that satisfy this condition, then the vectors are called linearly independent.
In the case  holds: The zero vector is linearly dependent, every other vector is linearly independent.
holds: The zero vector is linearly dependent, every other vector is linearly independent.
For in the case of linear dependence, at least one of the vectors  represented as a linear combination of the others.
represented as a linear combination of the others.
To define a coordinate system for an -dimensional space, one needs exactly linearly independent basis vectors. Then one can write each vector of this space uniquely as a linear combination of the basis vectors. More than vectors in the -dimensional space are always linearly dependent.
Collinearity of two vectors
Two linearly dependent vectors and also called collinear. In three-dimensional space it holds

Every vector is collinear with the zero vector. But if there are two vectors different from the zero vector, they are collinear exactly if

for an  is satisfied. They are parallel if positive and antiparallel if is negative.
is satisfied. They are parallel if positive and antiparallel if is negative.
Orthogonality
Two vectors and are orthogonal if their scalar product is equal to 0:
For geometric vectors with positive length this means that they enclose a right angle, see scalar product. The zero vector is orthogonal to any vector.
Standardization
A vector  (read "a roof") is called a unit vector or normalized if it has length 1. One normalizes a vector
(read "a roof") is called a unit vector or normalized if it has length 1. One normalizes a vector  , by dividing it by its length, i.e., multiplying it by the reciprocal of its length:
, by dividing it by its length, i.e., multiplying it by the reciprocal of its length:

The vector has the same direction as , but length 1. Other notations for are  ,
,  or
or  .
.
Unit vectors are important in the representation of coordinate systems.
Coordinates and components of a vector
→ Main article: Vector space basis
For example, the most widely used coordinate system, the Cartesian, is an orthonormal system because it is derived from the three mutually orthogonal unit vectors  ,
,  and
and  of the standard basis. The coordinates of a vector are then the scalar products of the vector with the basis vectors:
of the standard basis. The coordinates of a vector are then the scalar products of the vector with the basis vectors:

Thus, any vector can be represented as a linear combination of the basis vectors by writing it as the sum of its components with respect to the basis:

By changing to another orthonormal basis  the vector gets other coordinates
the vector gets other coordinates  and other components:
and other components:

More generally, any three but linearly independent vectors can be used as a vector space basis.

Generalizations
The definition of a vector in linear algebra as an element of a vector space is a much broader one, including a wide variety of mathematical objects (numbers, sequences, functions, and transformations) in addition to conventional, geometric vectors.
On the other hand, vectors are just one-step tensors, i.e. tensors with only one index.
Questions and answers
Q: What is a vector?
A: A vector is a mathematical object that has a size, called the magnitude, and a direction. It is often represented by boldface letters or as a line segment from one point to another.
Q: How do we usually draw vectors?
A: We usually draw vectors as arrows. The length of the arrow is proportional to the vector's magnitude and the direction in which the arrow points to is the vector's direction.
Q: What does it mean when someone asks for directions?
A: When asking for directions, if one says "Walk one kilometer towards the North", that would be a vector, but if they say "Walk one kilometer", without showing a direction, then that would be a scalar.
Q: What are some examples of how vectors can be used?
A: Vectors can be used to show the distance and direction something moved in. They can also be used when asking for directions or navigating an area.
Q: How are vectors represented mathematically?
A: Vectors are often represented by boldface letters (such as u, v, w) or as a line segment from one point to another (as in A→B).
Q: What does it mean when something is referred to as scalar?
A: When something is referred to as scalar it means that there isn't any directional information associated with it; only numerical values such as distance or speed.
Related articles
Author
AlegsaOnline.com Vector (mathematics and physics) Leandro Alegsa
URL: https://en.alegsaonline.com/art/104442