Torus: geometry, topology, types, measurements and applications
A torus is a ring-shaped surface or solid formed by revolving a circle. Studied in geometry and topology, it has major and minor radii, closed-form area and volume, and several distinct types and uses.
Overview
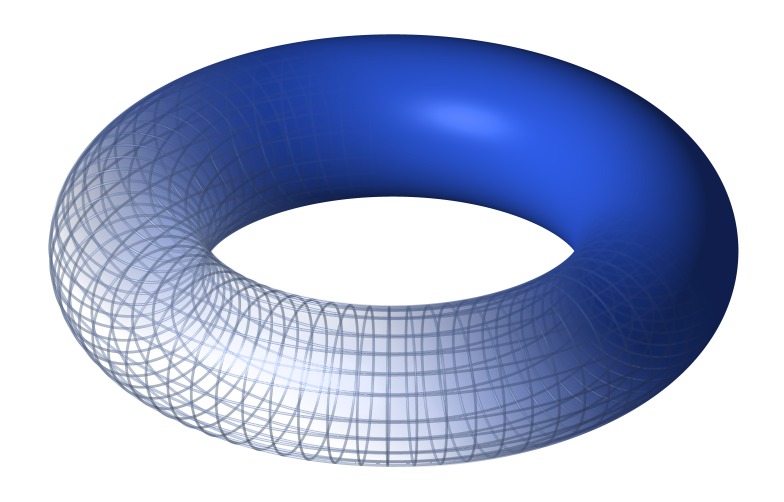
A torus is a familiar ring-shaped form — visually like a doughnut or inner tube — obtained in elementary geometry by revolving a circle about an external line in three-dimensional space. One way to imagine it is to take a tube and bend it until the ends meet, producing a surface with a hole through the center. The construction uses a circular cross section that is rotated around an axis of rotation which typically lies in the same plane as the generating circle.
Image gallery
10 Images






Basic geometry and parameters
Two radii commonly describe the standard ring torus: the minor radius r, which is the radius of the tube's circular cross-section, and the major radius R, the distance from the center of the tube to the center of the ring. For the canonical torus of revolution (a circle rotated about an external coplanar axis), these parameters satisfy R > r for a ring torus. When R equals r the surface is a horn torus, and when R < r the surface self-intersects producing a spindle torus. If the axis is tangent to the generating circle the special case is called a horn torus.
The surface area A of the torus of revolution and the volume V of the corresponding solid torus have simple closed forms derived by treating the torus as a rotated tube. The surface area is A = 4π² R r, and the volume of the solid torus formed by rotating a filled disk of radius r about the axis is V = 2π² R r². These formulas reflect the idea that the length of the circle traced by the center of the tube is 2πR while the cross-sectional perimeter or area gives the remaining factor.
Topological perspective
From the standpoint of topology, the torus is the standard example of a compact surface of genus one: it has a single hole and is classified as a genus‑1 surface. Topologically equivalent surfaces can be bent or stretched into one another without cutting; thus many seemingly different shapes are topologically tori. The torus has nontrivial loops in two independent directions, and its fundamental group is isomorphic to the direct product of two infinite cyclic groups (often written as Z×Z), reflecting those two independent cycles.
Parametrization and coordinate forms
In coordinates a common parametrization of the torus of revolution uses angle parameters θ and φ. Points on the surface may be written as x=(R+r cosθ) cosφ, y=(R+r cosθ) sinφ, z=r sinθ, with 0≤θ, φ <2π. These parametrizations are useful in calculus for computing area, curvature, and for setting up integrals in physics or engineering models.
Variations, toroids and solids
More generally, rotating other plane figures about an axis produces a toroid, and rotating a filled disk creates a solid torus (equivalently the product of a disk and a circle). Everyday examples of solid tori include a doughnut or bagel, O-rings and certain mechanical seals. In engineering the toroidal geometry is favored when a compact shape with a continuous central hole is required, for instance in toroidal inductors, disk-shaped seals, and some vessel designs.
Applications and notable properties
Tori appear across mathematics and applied sciences. In differential geometry and dynamical systems the torus is important because it can support flat metrics and periodic flows. In physics toroidal coordinates are useful for problems with rotational symmetry around a ring, and in computer graphics the torus is a common primitive shape for modeling and texture mapping. Practical engineering uses exploit the torus for compact containment, structural strength in rings, and continuous circular paths in piping or wiring.
Distinctions and practical notes
- A ring torus has R > r and a clear central hole; a horn torus has R = r and a spindle torus has R < r.
- Area and volume formulas above apply to the standard torus of revolution; cross-sections that are noncircular or distortions change these values and require specific computation.
- Topologically cutting a torus along different loops demonstrates differing outcomes: cutting along a meridian yields a cylinder, while cutting along a longitudinal loop yields a topologically distinct band.
For introductory demonstrations and models see basic notes on rotating a circle and the process of rotation; consult entries on the axis of rotation, planar tangent relations, and references about surface area and volume for worked examples. Together these perspectives—geometric construction, algebraic parametrization, and topological classification—give a rounded view of the torus as both a concrete shape and a fundamental mathematical object.





Volume
The volume of the torus can be calculated as a volume integral over the Jacobi determinant (the determinant of the functional matrix). The Jacobi matrix for the parametrization of the torus can be given as follows:

It follows:

Thus, the functional determinant here is equal to the norm of the surface normal vector.

Thus, we obtain for the volume of the solid torus  .
.
The formula for the volume can be interpreted as  multiplying the circular area
multiplying the circular area  by the circumference (see Second Guldin's Rule). This can be put in analogy to the cylinder volume
by the circumference (see Second Guldin's Rule). This can be put in analogy to the cylinder volume  understanding. It is the same with the surface area, here the perimeters
understanding. It is the same with the surface area, here the perimeters  and multiplied together (see First Guldin's Rule). This is also analogous to the cylinder surface
and multiplied together (see First Guldin's Rule). This is also analogous to the cylinder surface  .
.
Considering only the inner part of the torus, which has a distance from the  axis is less than or equal to
axis is less than or equal to  , we get the volume
, we get the volume

The outer part of the torus, which has a distance from the axis has a distance greater than or equal to , has the volume

Surface
The surface of the torus with the above parameter representation is

This formula can be derived either with Guldin's First Rule from

or with the help of the surface integral

calculate. Here  the surface element of the torus in the parameter representation above.
the surface element of the torus in the parameter representation above.
The torus bounds a 3-dimensional solid torus. The volume of the solid torus is (see Second Guldin's Rule).
Considering only the inner part of the torus, which has a distance from the axis is less than or equal to , we get the surface

The outer part of the torus, which has a distance from the axis has a distance greater than or equal to , has the surface

Torus as surface of revolution
A rotation torus is a surface of revolution created by rotating a circle about an axis of rotation lying in the plane of the circle and not intersecting the circle. A rotation torus can be described as the set of points that are a fixed distance from a circular line of radius  , where In Cartesian coordinates
, where In Cartesian coordinates  , with the z-axis as the axis of rotation and the centers of the rotating circle in the x-y plane, it is given by Eq.
, with the z-axis as the axis of rotation and the centers of the rotating circle in the x-y plane, it is given by Eq.

is described. Eliminating the root yields the 4th degree equation

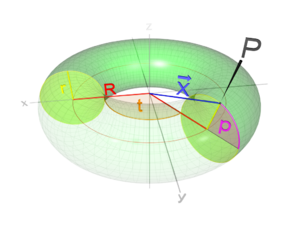
One can  introduce in the torus surface a toroidal coordinate
introduce in the torus surface a toroidal coordinate  and a poloidal coordinate perpendicular to it. The torus is thought of as being created by a circle rotated about an axis lying in the plane of the circle. We call the radius of the original circle , this circle also simultaneously forms a coordinate line of . The distance of the center of the circle from the axis we call , the coordinate lines of are circles around the axis of rotation. Both coordinates are angles and run from
and a poloidal coordinate perpendicular to it. The torus is thought of as being created by a circle rotated about an axis lying in the plane of the circle. We call the radius of the original circle , this circle also simultaneously forms a coordinate line of . The distance of the center of the circle from the axis we call , the coordinate lines of are circles around the axis of rotation. Both coordinates are angles and run from  to
to  .
.
Parameterization
The conversion of torus coordinates into Cartesian coordinates is

Torus coordinates are important in nuclear fusion technology, see nuclear fusion reactor.
Plane cuts
- Intersections with planes containing the axis of rotation are pairs of circles.
- Intersections with planes perpendicular to the axis of rotation are pairs of circles or a circle or empty.
- A plane parallel to the axis of rotation cuts out a spiral curve from a torus. In special cases this can be a Cassinian curve.
- An inclined plane touching two generating circles cuts out Villarceau circles.
Tori in descriptive geometry
In descriptive geometry, parts of a torus are used to construct transition surfaces between cylinders. The representation of a torus by its outline is found in outline constructions.


General definition
Let  is the circle (the 1-sphere). The
is the circle (the 1-sphere). The  -torus is then defined by
-torus is then defined by
 ,
,
where  is the product of topological spaces. The surface of revolution described in the previous section is a 2-torus. The 2-torus is usually simply called a torus.
is the product of topological spaces. The surface of revolution described in the previous section is a 2-torus. The 2-torus is usually simply called a torus.

Topological properties
Structure of a manifold
The -torus is a topological manifold. This follows from the fact that the -torus is the topological product of 1-spheres and the 1-sphere itself is a topological manifold. In addition, the 1-sphere is also a differentiable manifold and, since the product of differentiable manifolds again gives a differentiable manifold, the -torus is also a differentiable manifold. The dimension of  is equal to .
is equal to .
Topological properties
It also follows directly from the definition that the -torus is compact. Moreover, it is path coherent. Unlike the -sphere, the for  simply connected.
simply connected.
The mapping  , defined by
, defined by  , is the universal superposition of the -torus.
, is the universal superposition of the -torus.
Lie Group
The 1-sphere, conceived as a circle group, is also a Lie group. Since the product of several Lie groups with the componentwise multiplication is again a Lie group, the -torus is also a Lie group.
Embedded tori
Flat tori
Since the circle line obviously can be embedded in the  embedded, the -torus
embedded, the -torus  as a subset of the Euclidean space
as a subset of the Euclidean space  can be conceived. One considers on the Riemannian metric
can be conceived. One considers on the Riemannian metric  , which is given by the Euclidean metric of the space on the -torus is induced. This metric is flat, that is, the is locally isometric to a neighborhood of the
, which is given by the Euclidean metric of the space on the -torus is induced. This metric is flat, that is, the is locally isometric to a neighborhood of the  . In particular, therefore, its sectional curvature is everywhere constant zero. Since the -torus is compact and hence complete, it is a flat manifold. Therefore it is also called a flat -torus.
. In particular, therefore, its sectional curvature is everywhere constant zero. Since the -torus is compact and hence complete, it is a flat manifold. Therefore it is also called a flat -torus.
There are other flat metrics on the torus besides the one described above. Flat 2-tori can be described by a parallelogram whose opposite sides are glued together. Equivalently, flat tori can be described as topological factor groups  for two linearly independent vectors
for two linearly independent vectors  can be described. In the special case
can be described. In the special case  and
and  we obtain the quotient
we obtain the quotient  .
.
Elliptic curves over the complex numbers can be represented by Weierstrass parametrization as  for a lattice
for a lattice  and are thus (with a translation invariant metric) examples of flat tori. The moduli space of elliptic curves or equivalently of flat 2-tori is the so-called moduli curve.
and are thus (with a translation invariant metric) examples of flat tori. The moduli space of elliptic curves or equivalently of flat 2-tori is the so-called moduli curve.
Flat tori in three-dimensional space
A 2-times differentiable embedding of the torus into the three-dimensional space cannot be flat, because the local extrema must be points of positive curvature. However, according to Nash's embedding theorem, there are fractal (only 1 times differentiable) embeddings of the flat torus into the three-dimensional space. These can also be constructed numerically.
Rotation tori in three-dimensional space
A rotation torus is a 2-torus embedded in  embedded 2-torus, which can be described as the set of points that have fixed distance from a circular line of radius , where
embedded 2-torus, which can be described as the set of points that have fixed distance from a circular line of radius , where
Clifford-Tori
A Clifford torus is a special torus embedded in  embedded torus. After identifying
embedded torus. After identifying  and
and  , the standard Clifford torus can be described as.
, the standard Clifford torus can be described as.
 .
.
Furthermore, the images of  under isometries of the standard metric
under isometries of the standard metric  called Clifford-Tori.
called Clifford-Tori.
Using stereographic projection, Clifford tori can also be thought of as tori embedded in the embedded tori.
A Clifford torus is a minimal surface with respect to the standard metric on the  . The Lawson conjecture proved by Brendle states that any torus embedded as a minimal surface in the is a Clifford torus.
. The Lawson conjecture proved by Brendle states that any torus embedded as a minimal surface in the is a Clifford torus.

Construction from a square or cube
Construction of two-dimensional tori from a square or parallelogram
Unlike the surface of a sphere, the torus can be mapped onto a flat rectangular surface without singularities.
Here, the right edge of the rectangle or square is stitched to its left edge, and its bottom edge is stitched to its top edge. This construction also works with any parallelogram. Many computer games, for example Asteroids or Pac-Man, also have this topology: If a game object leaves the playing field on one side, it reappears on the opposite side.
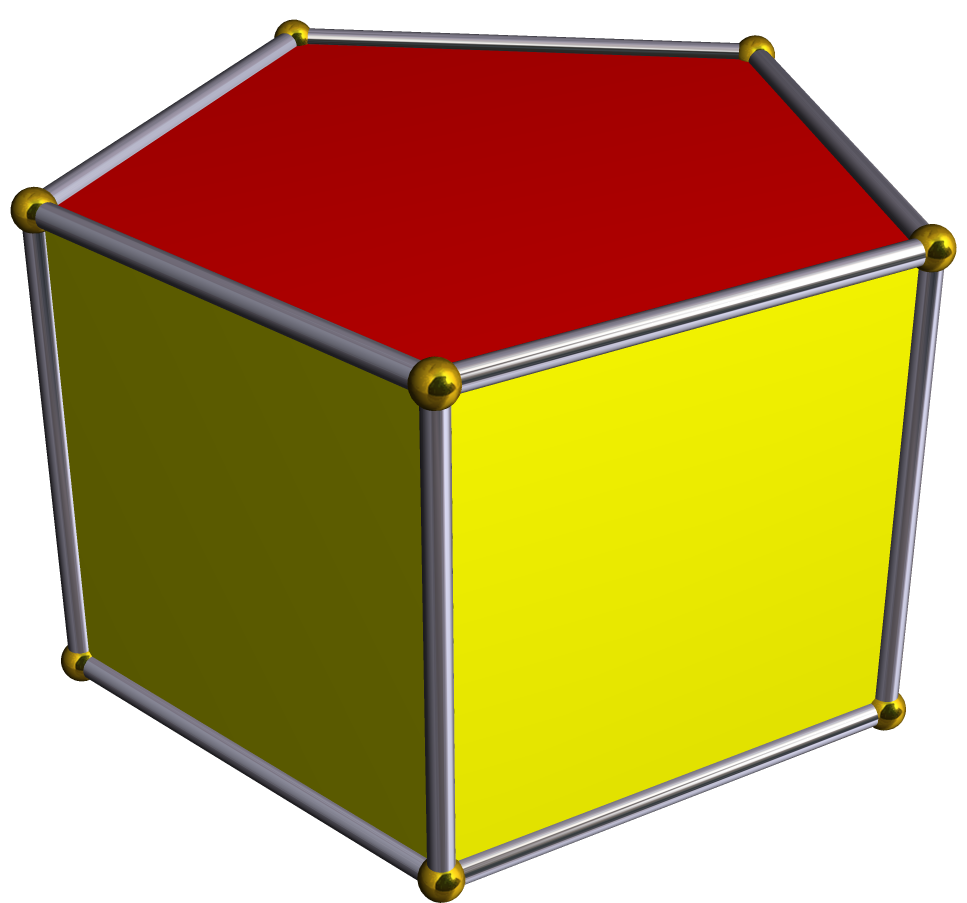
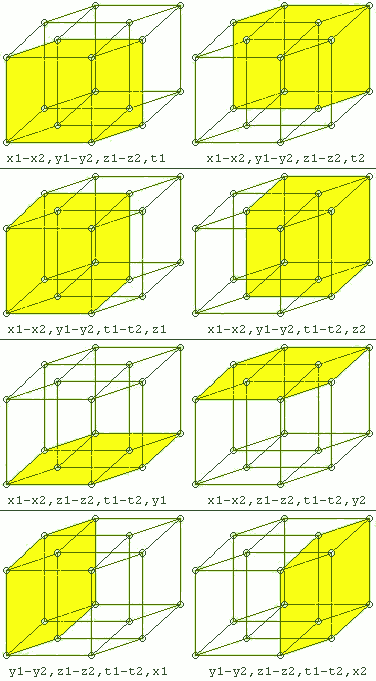
Construction of higher dimensional tori from a cube or parallelepiped
The three-dimensional torus or 3-torus is a parallelepiped or cube whose six opposite faces are interlocked in pairs.
The four-dimensional torus or 4-torus is a tesseract whose eight opposing cubes are interlocked in pairs.
In general, the -dimensional torus is an -dimensional cube ![[0,1]^{n}](https://www.alegsaonline.com/image/40160923273b7109968df994dca832b91d957bf2.svg) , whose opposite
, whose opposite  -hypercubes are pairwise identified with each other. It can also be written as
-hypercubes are pairwise identified with each other. It can also be written as  .
.
Again, instead of an -dimensional cube, one can use any -dimensional parallelepiped to construct an torus by identifying the sides.


Seven-color set
The seven-color theorem for the torus states that 7 colors are always sufficient to color any map on the surface of a torus so that no two adjacent countries get the same color.
This means that any graph that can be embedded in the torus has a chromatic number of at most 7 (see node coloring). Because the complete graph  can be embedded in the torus, the chromatic number is equal to 7.
can be embedded in the torus, the chromatic number is equal to 7.
In the plane or on a spherical surface, fewer colors are sufficient. The four-color theorem states that four colors are always sufficient to color any map in the Euclidean plane in such a way that no two adjacent countries get the same color.


Algebraic torus
In the theory of algebraic groups torus is used in a different sense. There it means a group which is isomorphic to a finite product of copies of the multiplicative group of a body. To distinguish it, one then speaks of an algebraic torus in contrast to a topological torus.
For example, in toric geometry, the study of toric varieties, a torus is usually an algebraic torus.
Application examples
A life ring with outer diameter 76 centimeters and inner diameter 44 centimeters has the shape of a torus. It therefore has a fixed distance  from a circular line with radius
from a circular line with radius  .
.
This results in the volume and the surface area:
- Volume:

- Surface:


See also
- Dotted torus
- Torus node
- Stanford Torus
- Torus antenna
- Spindle torus
- Dupin cyclides
Related articles
Author
AlegsaOnline.com Torus: geometry, topology, types, measurements and applications Leandro Alegsa
URL: https://en.alegsaonline.com/art/100783